- Y Diweddaraf sydd Ar Gael (Diwygiedig)
- Gwreiddiol (Fel y’i mabwysiadwyd gan yr UE)
Commission Delegated Regulation (EU) 2015/68Dangos y teitl llawn
Commission Delegated Regulation (EU) 2015/68 of 15 October 2014 supplementing Regulation (EU) No 167/2013 of the European Parliament and of the Council with regard to vehicle braking requirements for the approval of agricultural and forestry vehicles (Text with EEA relevance)
You are here:
- Rheoliadau yn deillio o’r UE
- 2015 No. 68
- Whole Regulation
- Blaenorol
- Nesaf

Pa Fersiwn
Rhagor o Adnoddau
PDF o Fersiynau Diwygiedig
- ddiwygiedig 09/06/20182.16 MB
- ddiwygiedig 14/10/20162.17 MB
Deddfwriaeth yn deillio o’r UE
Pan adawodd y DU yr UE, cyhoeddodd legislation.gov.uk ddeddfwriaeth yr UE a gyhoeddwyd gan yr UE hyd at ddiwrnod cwblhau’r cyfnod gweithredu (31 Rhagfyr 2020 11.00 p.m.). Ar legislation.gov.uk, mae'r eitemau hyn o ddeddfwriaeth yn cael eu diweddaru'n gyson ag unrhyw ddiwygiadau a wnaed gan y DU ers hynny.


Mae'r eitem hon o ddeddfwriaeth yn tarddu o'r UE
Mae legislation.gov.uk yn cyhoeddi fersiwn y DU. Mae EUR-Lex yn cyhoeddi fersiwn yr UE. Mae Archif Gwe Ymadael â’r UE yn rhoi cipolwg ar fersiwn EUR-Lex o ddiwrnod cwblhau’r cyfnod gweithredu (31 Rhagfyr 2020 11.00 p.m.).
Status:
EU_status_warning_original_version
This legislation may since have been updated - see the latest available (revised) version
Commission Delegated Regulation (EU) 2015/68
of 15 October 2014
supplementing Regulation (EU) No 167/2013 of the European Parliament and of the Council with regard to vehicle braking requirements for the approval of agricultural and forestry vehicles
(Text with EEA relevance)
THE EUROPEAN COMMISSION,
Having regard to the Treaty on the Functioning of the European Union,
Having regard to Regulation (EU) No 167/2013 of the European Parliament and of the Council of 5 February 2013 on the approval and market surveillance of agricultural and forestry vehicles(1), and in particular Article 17(5),
Whereas:
(1) The internal market comprises an area without internal frontiers in which the free movement of goods, persons, services and capital is ensured. To that end, a comprehensive EU type-approval system and a strengthened market surveillance system for agricultural and forestry vehicles and their systems, components and separate technical units as defined by Regulation (EU) No 167/2013 apply.
(2) The term ‘agricultural and forestry vehicles’ covers a wide range of different vehicle types with one or more axles and two, four or more wheels or track-laying vehicles, e.g. wheeled tractors, track-laying tractors, trailers and towed equipment, used for a wide variety of agricultural and forestry purposes, including special purpose works.
(3) While the requirements of this Regulation are based on existing legislation last amended in 1997, technical progress requires in particular the adaptation of the test rules in detail, as well as the introduction of specific provisions for energy reservoirs, vehicles with hydrostatic drive, vehicles with inertia braking systems, vehicles with complex electronic control systems, anti-lock braking systems and electronically controlled braking systems.
(4) This Regulation also includes stricter requirements on brake control of towed vehicles and brake coupling between the tractor and towed vehicles than Council Directive 76/432/EEC(2), repealed by Regulation (EU) No 167/2013.
(5) By Council Decision 97/836/EC(3), the Union acceded to United Nations Economic Commission for Europe (UNECE) Regulation No 13. The substantive requirements laid down in Annex 18 to that Regulation on safety aspects of complex electronic vehicle control systems should be taken over into this Regulation, as they reflect the latest state of technology.
(6) While anti-lock braking systems are wide-spread for vehicles with a maximum design speed of above 60 km/h and could thus be considered as appropriate and made compulsory as of its application by this Regulation, such systems are not yet widely available for vehicles with a design speed between 40 km/h and 60 km/h. For those vehicles, the introduction of anti-lock braking systems should thus be confirmed after a final assessment by the Commission of the availability of such systems. To this effect, the Commission should assess, at the latest by 31 December 2016, the availability of anti-lock braking systems for agricultural and forestry vehicles with a maximum design speed between 40 km/h and 60 km/h. Should this assessment not confirm that such technology is available or applicable, the Commission should amend this Regulation in order to provide that these requirements will not become applicable to vehicles with a design speed between 40 km/h and 60 km/h.
(7) Where manufacturers may choose to apply for national type approval in accordance with Article 2 of Regulation (EU) No 167/2013, Member States should, for all subjects covered in this Regulation be free to set requirements for the purposes of national type approval which are different from the requirements of this Regulation. Member States should not, for the purposes of national type-approval, refuse, on ground relating to the functional safety with respect to braking performance, to approve vehicles, systems, components and separate technical units which are compliant with the requirements provided for in this Regulation, with the exception of requirements applying to hydraulic connections of the single-line type. This Regulation should introduce harmonised requirements for hydraulic connections of the single-line type under which such connections could be accepted for the purposes of EU-type approval for a limited period of time. However, as some Member States used to have stricter requirements at national level, Member States should be allowed to refuse granting national type-approvals to vehicle types equipped with hydraulic connections of the single-line type already as from the application date of this Regulation, if they consider this to be in line with their safety requirements at national level.
(8) In order to allow for a harmonised application date of all new type-approval rules, this Regulation should apply from the same date of application as Regulation (EU) No 167/2013,
HAS ADOPTED THIS REGULATION:
CHAPTER I SUBJECT MATTER AND DEFINITIONS
Article 1Subject matter
This Regulation establishes the detailed technical requirements and test procedures regarding functional safety with respect to braking performance for the approval and market surveillance of agricultural and forestry vehicles and systems, components and separate technical units intended for such vehicles in accordance with Regulation (EU) No 167/2013.
Article 2Definitions
The definitions of Regulation (EU) No 167/2013 shall apply. In addition, the following definitions shall apply:
(1)
‘braking system’ means the combination of parts whose function is progressively to reduce the speed of a moving vehicle or to bring it to a halt, or to keep it stationary if it has already halted; the system consists of the control device, the transmission and the brake;
(2)
‘service braking system’ means the braking system that enables the driver to control the movement of the vehicle and to halt it safely, speedily and effectively, for all the range of speed and load that the vehicle is approved to operate, on any up or down gradient;
(3)
‘graduated braking’ means braking which, within the normal range of operation of the equipment, during either the application or the releasing of the brakes, fulfils all the following conditions:
(a)
the driver can, at any time, increase or reduce the braking force through action of the control device;
(b)
the braking force acts in the same direction as the action on the control device (monotonic function);
(c)
it is easily possible to make a sufficiently fine adjustment to the braking force;
(4)
‘control device’ means the device actuated directly by the driver to supply to the transmission the energy required for braking or controlling it. This energy may be the muscular energy of the driver, or energy from another source controlled by the driver, or in appropriate cases the kinetic energy of a towed vehicle, or a combination of these various kinds of energy;
(5)
‘transmission’ means the combination of components comprised between the control device and the brake, excluding the control lines between tractors and towed vehicles and supply lines between tractors and towed vehicles, and linking them functionally through mechanical, hydraulic, pneumatic or electric means or through the use of a combination of those means; where the braking power is derived from or assisted by a source of energy independent of the driver, the reserve of energy in the system is likewise part of the transmission;
(6)
‘control transmission’ means the combination of the components of the transmission which control the operation of the brakes and of the necessary reserve(s) of energy;
(7)
‘energy transmission’ means the combination of the components which supply to the brakes the necessary energy for their function;
(8)
‘friction brake’ means a brake where forces are generated by the friction between two parts of the vehicle moving relatively to one another;
(9)
‘fluid brake’ means a brake where forces are generated by the action of a fluid situated between two parts of the vehicle moving relatively to one another; the fluid is liquid in the case of a ‘hydraulic brake’ and air in the case of a ‘pneumatic brake’;
(10)
‘engine brake’ means a brake where forces are derived from a controlled increase in the braking action of the engine transmitted to the wheels;
(11)
‘parking braking system’ means a system that enables the vehicle to be held stationary on an up or down gradient even in the absence of the driver;
(12)
‘continuous braking’ means the braking of vehicles constituting a combination of vehicles through an installation having all the following characteristics:
(a)
a single control device which the driver actuates progressively, by a single movement, from his driving seat;
(b)
the energy used for braking the vehicles constituting the combination of vehicles is supplied from the same source;
(c)
the braking installation ensures simultaneous or suitably phased braking of each of the constituent vehicles of the combination, whatever their relative positions;
(13)
‘semi-continuous braking’ means the braking of vehicles constituting a combination of vehicles through an installation having all the following characteristics:
(a)
a single control device which the driver actuates progressively, by a single movement, from his driving seat;
(b)
the energy used for braking the vehicles constituting the combination of vehicles is supplied from two different sources;
(c)
the braking installation ensures simultaneous or suitably phased braking of each of the constituent vehicles of the combination, wherever their relative positions;
(14)
‘automatic braking’ means braking of the towed vehicle or towed vehicles occurring automatically in the event of separation of any of the vehicles constituting the combination of vehicles, including such separation through coupling breakage, without the effectiveness of the remainder of the combination being affected;
(15)
‘inertia braking’ means braking by utilising the forces generated by the towed vehicle's moving up on the tractor;
(16)
‘non-disengageable transmission’ means the transmission for which either pressure or force or torque are continuously transmitted at any time during travelling of the vehicle in the drive train between the vehicle engine and the wheels and in the braking system between the brake control device and the wheels;
(17)
‘laden vehicle’ means a vehicle loaded at its technically permissible maximum laden mass;
(18)
‘wheel load’ means the vertical static force of the road surface in the contact area on the wheel;
(19)
‘axle load’ means the sum of the vertical static forces of the road surface in the contact area on the wheels of the axle;
(20)
‘maximum stationary wheel load’ means the stationary wheel load achieved under the condition of the technically permissible maximum laden mass of the vehicle;
(21)
‘maximum stationary axle load’ means the stationary axle load achieved under the condition of the technically permissible maximum laden mass of the vehicle;
(22)
‘towed vehicle’ means a trailer as defined in Article 3(9) of Regulation (EU) No 167/2013 or an interchangeable towed equipment as defined in Article 3(10) of that Regulation;
(23)
‘drawbar towed vehicle’ means a towed vehicle of category R or S with at least two axles of which at least one is a steered axle, equipped with a towing device which can move vertically in relation to the towed vehicle and which transmits no significant static vertical load to the tractor;
(24)
‘centre-axle towed vehicle’ a towed vehicle of category R or S where one or more axles are positioned close to the centre of gravity of the vehicle when uniformly loaded so that only a small static vertical load, not exceeding 10 % of that corresponding to the maximum mass of the towed vehicle or a load of 1 000 daN, whichever is less, is transmitted to the tractor;
(25)
‘rigid drawbar towed vehicle’ means a towed vehicle of category R or S with one axle or one group of axles fitted with a drawbar which transmits a significant static load to the tractor due to its construction and which does not meet the definition of a centre-axle towed vehicle; the coupling to be used for a vehicle combination shall not consist of a king pin and a fifth wheel; some slight vertical movement may occur at a rigid drawbar; a hydraulically adjustable articulated drawbar is considered to be a rigid drawbar;
(26)
‘endurance braking system’ means an additional braking system having the capability to provide and to maintain a braking effect over a long period of time without a significant reduction in performance, including the control device which may comprise a single device or a combination of several devices each of which may have its own control;
(27)
‘electronically controlled braking system’ (EBS) means a braking system where the control is generated and processed as an electrical signal in the control transmission and electrical output signals to devices which generate actuating forces produced from stored or generated energy;
(28)
‘automatically commanded braking’ means a function within a complex electronic control system where actuation of the braking system or brakes of certain axles is made for the purpose of generating vehicle retardation with or without a direct action of the driver, resulting from the automatic evaluation of on board initiated information;
(29)
‘selective braking’ means a function within a complex electronic control system where actuation of individual brakes is made by automatic means and where vehicle retardation is secondary to vehicle behaviour modification;
(30)
‘electric control line’ means the electrical connection between two vehicles which provides the braking control function to a towed vehicle within a combination; it comprises the electrical wiring and connector and includes the parts for data communication and the electrical energy supply for the towed vehicle control transmission;
(31)
‘spring compression chamber’ means the chamber where the pressure variation that induces the compression of the spring is actually produced;
(32)
‘hydrostatic drive’ means a type of vehicle propulsion which uses a hydrostatic transmission, with open or closed circuit, in which fluid circulates as the energy medium between one or more hydraulic pumps and one or more hydraulic motors;
(33)
‘complex electronic vehicle control system’ is an electronic control system which is subject to a hierarchy of control in which a controlled function may be overridden by a higher level electronic control function or by a function performed by higher level electronic control system;
(34)
‘anti-lock braking system’ means the part of a service braking system which automatically controls the degree of slip, in the direction of rotation of the wheel, on one or more wheels of the vehicle during braking;
(35)
‘directly controlled wheel’ means a wheel whose braking force is modulated according to data provided at least by its own sensor;
(36)
‘hydraulic connection of the single line type’ means the connection of the brakes between the tractor and the towed vehicle through a single line of hydraulic fluid.
CHAPTER II REQUIREMENTS APPLYING TO BRAKING DEVICES AND TRAILER BRAKING COUPLINGS
Article 3Fitting and demonstration requirements related to braking performance
1.Manufacturers shall equip agricultural and forestry vehicles with systems, components and separate technical units affecting their braking performance that are designed, constructed and assembled so as to enable the vehicle in normal use and maintained according to the prescriptions of the manufacturer to comply with the detailed technical requirements and testing procedures laid down in Articles 4 to 17.
2.Manufacturers shall demonstrate by means of physical demonstration testing to the approval authority that the agricultural and forestry vehicles made available on the market, registered or entering into service in the Union comply with the detailed technical requirements and test procedures laid down in Articles 4 to 17.
3.Manufacturers shall ensure that spare parts that are made available on the market or are entering into service in the Union comply with the detailed technical requirements and test procedures laid down in this Regulation.
4.Instead of complying with the requirements of this Regulation, the manufacturer may present in the information folder the test report of a component or relevant documentation that proves the compliance of a system or of a vehicle with the requirements of UNECE Regulation No 13, as referenced in Annex X.
5.Instead of complying with the requirements of this Regulation, the manufacturer may present in the information folder relevant documentation that proves the compliance of Anti-lock Braking Systems for towed vehicles, if fitted, with the requirements in Annex 19, paragraph 5 to UNECE Regulation No 13, as referenced in Annex X.
6.The components and systems mentioned in paragraphs 4. and 5. will be referenced in the implementing act adopted in accordance with Article 68 of Regulation (EU) No 167/2013.
Article 4Requirements applying to construction and fitting of braking devices and trailer braking couplings
The test procedures and requirements applying to the construction and fitting of braking devices and trailer braking couplings shall be conducted and verified in accordance with Annex I.
Article 5Requirements applying to testing and performance of braking systems and trailer braking couplings and of vehicles fitted with them
The test procedures and performance requirements applying to braking systems and trailer braking couplings and to vehicles fitted with them shall be conducted and verified in accordance with Annex II.
Article 6Requirements applying to the measurement of the response time
The test procedures and performance requirements applying to the response time of braking devices and trailer braking couplings shall be conducted and verified in accordance with Annex III.
Article 7Requirements applying to energy sources and energy storage devices of braking systems and trailer braking couplings and to vehicles fitted with them
The test procedures and performance requirements applying to energy sources and energy storage devices of braking systems and trailer braking couplings and to vehicles fitted with them shall be conducted and verified in accordance with Annex IV.
Article 8Requirements applying to spring brakes and to vehicles fitted with them
The test procedures and performance requirements applying to spring brakes and to vehicles fitted with them shall be conducted and verified in accordance with Annex V.
Article 9Requirements applying to parking braking systems equipped with a mechanical brake-cylinder locking device
The performance requirements applying to parking braking systems equipped with a mechanical brake-cylinder locking device shall be verified in accordance with Annex VI.
Article 10Alternative test requirements for vehicles for which Type-I, Type-II or Type-III tests are not mandatory
1.The conditions under which test Type I, Type II or Type III are not mandatory for certain types of vehicles are laid down in Annex VII.
2.The test procedures and performance requirements applying to vehicles and their braking devices for which Type-I, Type-II or Type-III tests are not mandatory in accordance with paragraph 1 shall be conducted and verified in accordance with Annex VII.
Article 11Requirements applying to the testing of inertia braking systems, braking devices and trailer braking couplings and of vehicles fitted with them as regards braking
The procedures and requirements applying to the testing of inertia braking systems, braking devices and trailer braking couplings and of vehicles fitted with them as regards braking shall be conducted and verified in accordance with Annex VIII.
Article 12Requirements applying to vehicles with hydrostatic drive and their braking devices and braking systems
The test procedures and performance requirements applying to vehicles with hydrostatic drive and their braking devices and braking systems shall be conducted and verified in accordance with Annex IX.
Article 13Requirements applying to the safety aspects of complex electronic vehicle control systems
The test procedures and performance requirements applying to the safety aspects of complex electronic vehicle control systems shall be conducted and verified in accordance with Annex X.
Article 14Requirements and test procedures applying to anti-lock braking systems and to vehicles fitted with them
The test procedures and requirements applying to anti-lock braking systems and to vehicles fitted with them shall be conducted and verified in accordance with Annex XI.
Article 15Requirements applying to EBS of vehicles with compressed-air braking systems or of vehicles with data communication via pin 6 and 7 of ISO 7638 connector and to vehicles fitted with such EBS
The test procedures and performance requirements applying to EBS of vehicles with compressed-air braking systems or of vehicles with data communication via pin 6 and 7 of ISO 7638 connector and to vehicles fitted with such EBS shall be conducted and verified in accordance with Annex XII.
Article 16Requirements applying to hydraulic connections of the single-line type and to vehicles fitted with them
1.The performance requirements applying to hydraulic connections of the single-line type of braking devices and trailer braking couplings and to vehicles fitted with hydraulic connections of the single-line type are laid down in Annex XIII.
2.Vehicle manufacturers shall not fit hydraulic connections of the single-line type to new types of vehicles of category T and C after 31 December 2019 and to new vehicles of those categories after 31 December 2020.
CHAPTER III OBLIGATIONS OF THE MEMBER STATES
Article 17Type-approval of vehicles, systems, components and separate technical units
Pursuant to Article 6(2) of Regulation (EU) No 167/2013, with effect from 1 January 2016, approval authorities shall not refuse, on grounds relating to functional safety with regard to braking performance, to grant EU type-approval to agricultural and forestry vehicle types which comply with the requirements of this Regulation.
With effect from 1 January 2020 and in accordance with Article 6(2) of Regulation (EU) No 167/2013 and Article 16 of this Regulation, type-approval authorities shall refuse to grant type-approval to vehicle types of categories T and C fitted with hydraulic connections of the single-line type.
With effect from 1 January 2018, national authorities shall, in the case of new vehicles that do not comply with Regulation (EU) No 167/2013 and the provisions of this Regulation on functional safety with regard to braking performance, prohibit the making available on the market, registration, or entry into service of such vehicles.
With effect from 1 January 2021, for new vehicles of categories T and C fitted with hydraulic connections of the single-line type set out in Article 16, national authorities shall prohibit the making available on the market, registration, or entry into service of such vehicles.
Article 18National type-approval of vehicles, systems, components and separate technical units
National authorities shall not refuse to grant national type-approval to a type of vehicle, system, component or separate technical unit on grounds relating to the functional safety with regard to braking performance where the vehicle, system, component or separate technical unit complies with the requirements set out in this Regulation, with the exception of the requirements applying to hydraulic connections of the single-line type.
CHAPTER IV FINAL PROVISION
Article 19Entry into force and application
This Regulation shall enter into force on the twentieth day following that of its publication in the Official Journal of the European Union.
It shall apply as of 1 January 2016.
This Regulation shall be binding in its entirety and directly applicable in all Member States.
Done at Brussels, 15 October 2014.
For the Commission
The President
José Manuel Barroso
LIST OF ANNEXES
| Annex Number | Annex title | Page No. |
|---|---|---|
| I | Requirements applying to construction and fitting of braking devices and trailer braking couplings | 10 |
| II | Requirements applying to testing and performance of braking systems and trailer braking couplings and of vehicles fitted with them | 27 |
| III | Requirements applying to the measurement of the response time | 49 |
| IV | Requirements applying to energy sources and energy storage devices of braking systems and trailer braking couplings and to vehicles fitted with them | 60 |
| V | Requirements applying to spring brakes and to vehicles fitted with them | 67 |
| VI | Requirements applying to parking braking systems equipped with a mechanical brake-cylinder locking device | 70 |
| VII | Alternative test requirements for vehicles for which Type-I, Type-II or Type-III tests are not mandatory | 71 |
| VIII | Requirements applying to the testing of inertia braking systems, braking devices and trailer braking couplings and of vehicles fitted with them as regards braking | 83 |
| IX | Requirements applying to vehicles with hydrostatic drive and their braking devices and braking systems | 98 |
| X | Requirements applying to the safety aspects of complex electronic vehicle control systems | 104 |
| XI | Requirements and test procedures applying to anti-lock braking systems and to vehicles fitted with them | 105 |
| XII | Requirements applying to EBS of vehicles with compressed-air braking systems or of vehicles with data communication via pin 6 and 7 of ISO 7638 connector and to vehicles fitted with such EBS | 121 |
| XIII | Requirements applying to hydraulic connections of the single-line type and to vehicles fitted with them | 136 |
ANNEX I Requirements applying to construction and fitting of braking devices and trailer braking couplings
1. Definitions
For the purposes of this Annex:
1.1.
‘coupling force control’ means a system or function to balance automatically the braking rate of tractor and towed vehicle;
1.2.
‘nominal demand value’ means a characteristic of coupling force control that relates the coupling head signal to the braking rate and which can be demonstrated at type-approval, within the limits of the compatibility bands of Appendix 1 of Annex II;
1.3.
‘track rollers’ means the system that transmits the weight of the vehicle and crawler undercarriage to the ground via the track belt, transmits torque from the vehicle's drive system to the track belt and may produce a change of direction of the moving belt;
1.4.
‘crawler undercarriage’ means a system comprising at least two track rollers, which are spaced a specified distance apart in one plane (in-line) and a continuous metallic or rubber track belt that runs around them;
1.5.
‘track belt’ means a continuous flexible belt, which can absorb longitudinal tractive forces.
2. Construction and fitting requirements
2.1.General
The maximum design speed is considered, throughout this Annex, to be in the forward direction of the vehicle travel, unless otherwise explicitly mentioned.
2.1.1.Braking components, separate technical units and parts
2.1.1.1.The braking components, separate technical units and parts shall be so designed, constructed and fitted as to enable the vehicle in normal use, despite the vibration to which it may be subjected, to comply with the under mentioned requirements.
2.1.1.2.In particular, the braking components, separate technical units and parts shall be so designed, constructed and fitted as to be able to resist the corrosion and ageing phenomena to which it is exposed.
2.1.1.3.Brake linings shall not contain asbestos.
2.1.1.4.It is not permitted to fit any components, separate technical units and parts (such as valves) that would allow the performance of the braking system to be changed by the user of the vehicle such that, in service, it falls outside the requirements of this Regulation. A component, separate technical unit and part that can only be operated by the manufacturer through the use of special tool or the provision of a tamper proof seal or both shall be permitted provided that the user of the vehicle is not able to modify this component, separate technical unit and part or that any user modification is readily identifiable by enforcement authorities.
2.1.1.5.A towed vehicle shall be equipped with an automatic load sensing device, with the exception of the following cases:
2.1.1.5.1.
If a towed vehicle with a maximum design speed not exceeding 30 km/h cannot be equipped for technical reasons with an automatic load sensing device, it may be equipped with a device having at least three discrete settings for the control of the braking forces.
2.1.1.5.2.
In the special case that a towed vehicle allows by design that only two discrete loading conditions ‘unladen’ and ‘laden’ can be realised then the vehicle may have only two discrete settings for the control of the braking forces.
2.1.1.5.3.
S-category vehicles the machinery of which does not contain any other load including consumable material.
2.1.2.Functions of the braking system
The braking system shall fulfil the following functions:
2.1.2.1.Service braking system
It shall be possible to graduate the service braking system action. The driver shall be able to achieve this braking action from his driving position without removing his hands from the steering control device.
2.1.2.2.Secondary braking system
The secondary braking system shall make it possible to halt the vehicle within a reasonable distance in the event of the failure of the service braking system. On tractors, it shall be possible to graduate this braking action. The driver shall be able to obtain this braking action from his driving seat while keeping at least one hand on the steering control device. For the purpose of these requirements, it is assumed that not more than one failure of the service braking system can occur at one time.
2.1.2.3.Parking braking system
The parking braking system shall enable the vehicle to be held stationary on an up or down gradient even in the absence of the driver, the working parts of the braking system being then held in the locked position by a purely mechanical device. The driver shall be able to achieve this braking action from his driving seat, subject, in the case of a towed vehicle, to the requirements of point 2.2.2.11.
The towed vehicle service braking system (pneumatic or hydraulic) and the parking braking system of the tractor may be operated simultaneously, provided that the driver is able to check, at any time, that the parking braking system performance of the vehicle combination, obtained by the purely mechanical action of the parking braking system, is sufficient.
2.1.3.The relevant requirements of Appendix 1 of Annex II shall be applied to vehicles and their braking systems.
2.1.4.Connections, for compressed-air braking systems, between tractors and towed vehicles
2.1.4.1.The connections of the compressed-air braking systems between tractors and towed vehicles shall be provided according to the following points 2.1.4.1.1, 2.1.4.1.2 or 2.1.4.1.3.
2.1.4.1.1.
one pneumatic supply line and one pneumatic control line;
2.1.4.1.2.
one pneumatic supply line, one pneumatic control line and one electric control line;
2.1.4.1.3.
one pneumatic supply line and one electric control line. Until uniform technical standards have been agreed, which ensure compatibility and safety, connections between tractors and trailers conforming to the provisions of this point shall not be permitted.
2.1.5.Connections between tractors and towed vehicles with hydraulic braking systems
2.1.5.1.Type of connections
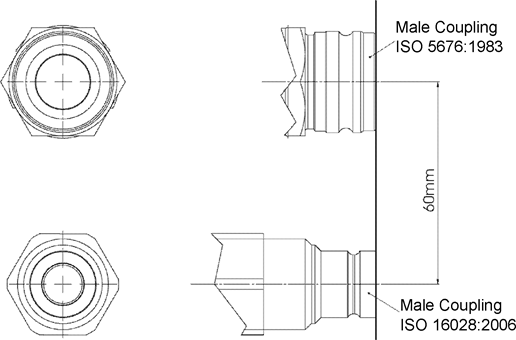
2.1.5.1.1.Hydraulic control line: this is the connecting line with the male connector on the tractor and the female connector on the towed vehicle. The connectors shall comply with ISO 5676:1983.
2.1.5.1.2.Hydraulic supplementary line: this is the connecting line with the male connector on the tractor and the female connector on the towed vehicle. The connectors shall comply with ISO 16028:2006, size 10.
2.1.5.1.3.ISO 7638:2003 connector (optional). The ISO 7638:2003 connector may be used for 5 pin or 7 pin applications, as appropriate.
The positioning of the connectors as specified in points 2.1.5.1.1 and 2.1.5.1.2 shall be arranged on the tractor as illustrated in Figure 1.
2.1.5.2.With the engine running and the parking braking system of the tractor fully applied:
2.1.5.2.1.
a pressure of 0+100 kPa is present on the supplementary line and/or
2.1.5.2.2.
a pressure between 11 500 kPa and 15 000 kPa is generated on the control line.
2.1.5.3.With the engine running and the parking braking system of the tractor fully released a pressure between the values provided at point 2.2.1.18.3 shall be present on the supplementary line.
2.1.5.4.With the engine running and no brake control on the tractor applied (driving or stand-by condition), the pressure supplied at the coupling head of the control line shall be the one provided at point 2.2.1.18.2.
2.1.5.5.With the engine running and the service brake control device on the tractor fully actuated a pressure between 11 500 kPa and 15 000 kPa shall be generated in the control line. For pressurising the control line during service brake application the tractor shall be capable to comply with requirement of point 3.6 of Annex III.
2.1.6.The flexible hoses and cables connecting tractors and towed vehicles shall be a part of the towed vehicle.
2.1.7.Shut-off devices which are not automatically actuated shall not be permitted.
2.1.8.Pressure test connections
2.1.8.1.For the purpose of determining the in-use braking forces of each axle of the vehicle, with a compressed-air braking system, air pressure test connections must be provided:
2.1.8.1.1.
In each independent circuit of the braking system, at the closest readily accessible position to the brake cylinder which is the least favourably placed as far as the response time described in Annex III is concerned.
2.1.8.1.2.
In a braking system which incorporates a device that modulates the air or hydraulic pressure in the brake transmission as referred to in point 6.2 of Appendix I to Annex II, located in the pressure line upstream and downstream of this device at the closest accessible position. If this device is pneumatically controlled an additional test connection is required to simulate the laden condition. Where no such device is fitted, a single pressure test connection, equivalent to the downstream connector mentioned above, shall be provided. These test connections shall be so located as to be easily accessible from the ground or within the vehicle.
2.1.8.1.3.
At the closest readily accessible position to the least favourably placed energy storage device within the meaning of point 2.4 of section A of Annex IV.
2.1.8.1.4.
In each independent circuit of the braking system so it is possible to check the input and output pressure of the complete transmission line.
2.1.8.1.5.
The pressure test connections shall comply with clause 4 of ISO Standard 3583:1984.
2.2.Requirements of braking systems
2.2.1.Vehicles of categories T and C
2.2.1.1.The set of braking systems with which a vehicle is equipped shall satisfy the requirements laid down for the service, secondary and parking braking systems.
In order to assist the driver in steering (to enable differential braking in the field) the service braking system of the tractor may consist of two independent brake circuits, each connected to one separate right or left brake pedal.
If the differential braking function is activated it shall not be possible to travel at speeds exceeding 40 km/h or at speeds in excess of 40 km/h the differential braking function shall be disabled. These two operations shall be ensured by automatic means.
If the differential mode is activated an actuation of the towed vehicle service braking system is not required up to a speed of 12 km/h.
In tractors where the separate pedals can be connected manually, the driver shall be able to easily verify from his driving place whether these pedals are connected or not.
2.2.1.2.The equipment providing service, secondary and parking braking may have common components, provided that they fulfil the following conditions:
2.2.1.2.1.
There shall be at least two controls, each corresponding to a different braking system, independent of each other and readily accessible to the driver from his normal driving position. For all categories of vehicles, every brake control device (excluding endurance braking system control device) shall be designed in a way that it returns to the fully-off position when released. This requirement shall not apply to a parking braking system control device (or that part of a combined control device) when it is mechanically locked in an applied position or it is utilised for the secondary braking or in both cases.
2.2.1.2.2.
The control device of the service braking system shall be independent of the control device of the parking braking system.
2.2.1.2.3.
Where the service and secondary braking systems have the same control device, the effectiveness of the linkage between that control device and the various components of the transmission systems shall not be liable to deteriorate after a certain period of use.
2.2.1.2.4.
Where the service and secondary braking systems have the same control device, the parking braking system shall be so designed that it can be actuated when the vehicle is in motion. This requirement shall not apply if the vehicle's service braking system can be actuated, even partially, by means of an auxiliary control.
2.2.1.2.5.
In the event of a breakage of any component other than the brakes or the components specified in point 2.2.1.2.7, or of any other failure of the service braking system (malfunction, partial or total exhaustion of an energy reserve), the secondary braking system or that part of the service braking system which is not affected by the failure shall be able to bring the vehicle to a halt in the conditions prescribed for secondary braking.
2.2.1.2.6.
In particular, where the secondary braking system and the service braking system have a common control device and common transmission:
2.2.1.2.6.1.
where the service braking system is actuated by the muscular energy of the driver assisted by one or more energy reserves, the secondary braking performance shall, in the event of failure of that assistance, be capable of being ensured by the muscular energy of the driver assisted by the energy reserves, if any, which are unaffected by the failure, the force applied to the control device not exceeding the prescribed maxima.
2.2.1.2.6.2.
If the service braking force and transmission depend exclusively on the use, controlled by the driver, of an energy reserve, there shall be at least two completely independent energy reserves, each provided with its own transmission likewise independent; each of them may act on the brakes of only two or more wheels so selected as to be capable of ensuring by themselves the prescribed degree of secondary braking without endangering the stability of the vehicle during braking; in addition, each of the those energy reserves shall be equipped with a warning device. In at least one of the air reservoirs of each service braking circuit a device for draining and exhausting is required in an adequate and easily accessible position.
2.2.1.2.6.3.
If the service braking force and transmission depend exclusively on the use of an energy reserve, one energy reserve for the transmission is deemed to be sufficient, provided that the prescribed secondary braking is ensured by the action of the driver's muscular energy acting on the service brake control device and the requirements of point 2.2.1.5 are met.
2.2.1.2.7.
Certain parts, such as the pedal and its bearing, the master cylinder and its piston(s) (hydraulic systems), the control valve (hydraulic or pneumatic systems), the linkage between the pedal and the master cylinder or the control valve, the brake cylinders and their pistons (hydraulic or pneumatic systems), and the lever-and-cam assemblies of brakes, shall not be regarded as liable to breakage if they are amply dimensioned, are readily accessible for maintenance, and exhibit safety features at least equal to those prescribed for other essential components (such as the steering linkage) of the vehicle. Where the failure of any such part would make it impossible to brake the vehicle with a performance at least equal to that prescribed for the secondary braking system that part shall be made of metal or of a material with equivalent characteristics and shall not be subject to significant distortion in the normal operation of the braking systems.
2.2.1.3.Where there are separate control devices for the service and secondary braking systems simultaneous actuation of control devices shall not render both the service and secondary braking systems inoperative, either when both braking systems are in good working order or when one of them is faulty.
2.2.1.4.Where use is made of energy other than the muscular energy of the driver, there need not be more than one source of such energy (hydraulic pump, air compressor, etc.), but the means by which the device constituting that source is driven shall be as safe as practicable.
2.2.1.4.1.In the event of failure in any part of the transmission of a vehicle's braking system consisting of two service braking circuits fulfilling the requirements of point 2.2.1.25, the supply to the part not affected by the failure shall continue to be ensured where this is required for the purpose of halting the vehicle with the degree of effectiveness prescribed for residual and/or for secondary braking. This condition shall be satisfied by automatic means.
2.2.1.4.2.Furthermore, storage devices located down-circuit of this device are such that in the event of a failure in the energy supply, after four full-stroke actuations of the service braking system control device under the testing conditions prescribed in point 1.2 of section A or in point 1.2 of section B or in point 1.2 of section C of Annex IV, following to the kind of braking system, it is still possible to halt the vehicle at the fifth application with the degree of effectiveness prescribed for secondary braking.
2.2.1.4.3.For hydraulic braking systems with stored energy, requirements of points 2.2.1.4.1 and 2.2.1.4.2 shall be considered to be met, provided that the requirements of point 1.2.2. of Part C of Annex IV to this Regulation, are satisfied.
2.2.1.4.4.In the case of a service braking system consisting of only one service braking circuit it is required that in the event of a failure or non-availability of the energy source it shall be possible halting the vehicle with the service braking system control with the degree of effectiveness prescribed for secondary braking.
2.2.1.5.The requirements of points 2.2.1.2, 2.2.1.4 and 2.2.1.25 shall be satisfied without the use of any automatic device of a kind such that its ineffectiveness might pass unnoticed because the parts which are normally in an ‘at rest’ position are actuated only in the event of failure of the braking system.
2.2.1.6.On vehicles with a maximum design speed not exceeding 30 km/h, the service braking system shall act on all the wheels of at least one axle. In all other cases the service braking system shall act on all the wheels of the vehicle. However, in case of vehicles with one braked axle and an automatic engagement of the drive to all other axles during braking, all wheels are deemed to be braked.
For category C vehicles this condition is considered to be met if all of the track rollers of the vehicle are braked. For category C vehicles with a design speed of less than 30 km/h, this condition is considered to be met if at least one track roller on each side of the vehicle is braked.
For vehicles equipped with a straddle seat and handlebars, the service braking may act either on the front axle or on the rear axle provided that all the performance requirements prescribed in point 2 of Annex II to this Regulation are met.
For articulated tractors of category Ta, if an axle is subject to braking and the differential is mounted between the service brake and the wheels, all wheels of that axle are deemed to be braked when the activation of the service braking system automatically locks the differential on this axle.
2.2.1.6.1.Performance of hydraulic lines and hose assemblies in case of vehicles with one braked axle and an automatic engagement of the drive to all other axles during braking
The hydraulic lines of hydraulic transmission shall be capable of a burst pressure at least four times the maximum normal service pressure (T) specified by the vehicle manufacturer. Hose assemblies shall comply with ISO Standards 1402:1994, 6605:1986 and 7751:1991.
2.2.1.7.If the service braking system acts on all wheels or track rollers of the vehicle, the action shall be appropriately distributed among the axles. Where this is achieved by means of a device which modulates the pressure in the brake transmission, this shall conform to the requirements of point 6 of Appendix 1 to Annex II and point 2.1.8.
2.2.1.7.1.In the case of vehicles with more than two axles, in order to avoid wheel-locking or glazing of the brake linings, the brake force on certain axles may be reduced to zero automatically when carrying a much reduced load, provided that the vehicle meets all the performance requirements prescribed in Annex II.
2.2.1.8.The action of the service braking system shall be distributed between the wheels or track rollers of the same axle symmetrically in relation to the longitudinal median plane of the vehicle.
2.2.1.9.The service, secondary and the parking braking systems shall act on braking surfaces permanently connected to the wheels through components of adequate strength. It shall not be possible to disconnect a braking surface from the wheels; however, such disconnection shall be permitted in the case of the parking braking system, provided that it is controlled exclusively by the driver from his driving seat by a system which cannot be actuated by a leak. When more than one axle is normally subject to braking in the case of vehicles of categories T and C with a maximum design speed not exceeding 60 km/h, one axle may be decoupled provided that activation of the service braking system automatically re-couples this axle and that, in the case of a failure in the energy supply or a failure in the control transmission of the re-coupling control device, then automatic re-coupling shall be ensured.
2.2.1.10.It shall be possible for the wear of the service brakes to be compensated by means of a system of manual adjustment. For vehicles of categories Tb and Cb, the wear of the service brakes shall be compensated by means of a system of automatic adjustment. In addition, the control device and the components of the transmission and of the brakes shall possess a reserve of travel and, if necessary, suitable means of compensation such that, when the brakes become heated or when the brake linings have reached a certain degree of wear, effective braking shall be ensured without immediate adjustment being necessary.
Vehicles of categories Ta, and category Ca, do not need to be fitted with a system where the wear of the brakes are compensated by means of a system of automatic adjustment. However, if vehicles of these categories are equipped with system where the wear of the brakes are compensated by means of a system of automatic adjustment, this system shall comply with the same requirements as those of category Tb and Cb.
2.2.1.10.1.Automatic wear adjustment devices, if fitted, shall, after heating followed by cooling, be capable of free running as laid down in point 2.3.4 of Annex II following the Type-I test also specified in point 1.3 of that Annex.
It shall be possible to easily check this wear on service brake linings from the outside or underside of the vehicle, utilising only the tools or equipment normally supplied with the vehicle; for instance, by the provision of appropriate inspection holes or by some other means. Alternatively, acoustical or optical devices warning the driver at his driving position when lining replacement is necessary are acceptable.
2.2.1.10.2.The requirements of 2.2.1.10 and 2.2.1.10.1 are not applicable to oil immersed brakes which are designed for the whole lifetime of the vehicle without servicing.
2.2.1.11.In hydraulic braking systems:
2.2.1.11.1.
The filling ports of the fluid reservoirs shall be readily accessible; in addition, the containers of reserve fluid shall be so made that the level of the reserve fluid can be easily checked without the containers having to be opened. Where this last condition is not fulfilled, the red warning signal specified in point 2.2.1.29.1.1 shall draw the driver's attention to any fall in the level of reserve fluid liable to cause a failure of the braking system.
2.2.1.11.2.
A failure in the hydraulic transmission where the prescribed service braking performance cannot be obtained shall be signalled to the driver by a device comprising a warning signal, as specified in point 2.2.1.29.1.1. Alternatively, the lighting up of this device when the fluid in the reservoir is below a certain level specified by the manufacturer shall be permitted.
2.2.1.11.3.
The type of fluid to be used in the hydraulic transmission of braking systems shall be identified by the symbol in accordance with Figure 1 or 2 of Standard ISO 9128:2006. The symbol shall be affixed within 100 mm of the filling ports of the fluid reservoirs, in accordance with the requirements laid down on the basis of Article 17(2)(k) and (5) of Regulation (EU) No 167/2013. Additional information may be provided by the manufacturers. This requirement only applies to vehicles having a separate filling port for the fluid of the braking system.
2.2.1.12.Warning device
2.2.1.12.1.Any vehicle fitted with a service braking system actuated by an energy reservoir shall, where the prescribed secondary braking performance cannot be obtained by means of this braking system without the use of stored energy, be provided with a warning device — in addition to a pressure gauge where fitted — giving an optical or acoustic signal when the stored energy in any part of the system falls to a value at which, without recharging of the reservoir and irrespective of the loading conditions of the vehicle, it shall be possible to apply the service braking system control device a fifth time after four full-stroke actuations and obtain the prescribed secondary braking performance (without faults in the service-brake transmission and with the brakes adjusted as closely as possible). The warning device shall be directly and permanently connected to the circuit. When the engine is running under normal operating conditions and there are no faults in the braking system, the warning device shall give no signal except during the time required for charging the energy reservoir(s) after start-up of the engine.
2.2.1.12.1.1.However, in the case of vehicles which are only considered to comply with the requirements of point 2.2.1.4.1 by virtue of meeting the requirements of point 1.2.2 of section C of Annex IV the alarm device shall consist of an acoustic signal in addition to an optical signal. These devices need not operate simultaneously, provided that each of them meets the above requirements and the acoustic signal is not actuated before the optical signal.
2.2.1.12.2.This acoustic device may be rendered inoperative while the parking braking system is applied or, at the choice of the manufacturer, in the case of automatic transmission the selector in the ‘park’ position or in both cases.
2.2.1.13.Without prejudice to the requirements of point 2.1.2.3, where the use of an auxiliary energy source is essential for the operation of a braking system, the energy reserve shall be such as to ensure that, should the engine stop, or in the event of a failure of the means by which the energy source is driven, the braking performance remains sufficient to bring the vehicle to a halt in the prescribed conditions. In addition, if the muscular energy applied by the driver to the parking braking system is reinforced by some aid, the actuation of the parking braking system shall be ensured in the event of failure of that aid, if necessary by using a reserve of energy independent of that normally supplying such aid. This reserve of energy may be that intended for the service braking system.
2.2.1.14.In the case of a tractor to which the coupling of a towed vehicle equipped with a brake controlled by the driver of the tractor is authorised, the service braking system of the tractor shall be fitted with a device so designed that if the towed vehicle braking system should fail, or the supply line (or such other type of connection as may be adopted) between the tractor and towed vehicle should break, it will still be possible to brake the tractor with the performance prescribed for the secondary braking system; it is accordingly prescribed, in particular, that this device be fitted to the tractor service braking system ensuring that the tractor can still be braked by the service braking system with a performance prescribed for the secondary braking system.
2.2.1.15.The pneumatic or hydraulic auxiliary equipment shall be automatically supplied with energy in such a way that during its operation the prescribed performance values can be reached and that even in the event of damage to the source of energy, the operation of the auxiliary equipment cannot cause the reserves of energy feeding the braking systems to fall below the level indicated in point 2.2.1.12.
2.2.1.16.A tractor authorised to tow a category R2, R3, R4 or S2 vehicle shall satisfy the following conditions:
2.2.1.16.1.
When the service braking system of the tractor is actuated there shall also be a graduated braking action on the towed vehicle, see also point 2.2.1.18.4.
2.2.1.16.2.
When the tractor's secondary braking system comes into action, there shall also be a braking action in the towed vehicle. In the case of tractors of categories Tb and Cb this braking action shall be graduable.
2.2.1.16.3.
Should the service braking system of the tractor fail, and if this system is made up of at least two independent sections, the section or sections not affected by this failure shall be able to fully or partially actuate the towed vehicle brakes. This requirement does not apply where the two independent sections consist in one section braking left hand wheels and one section braking right hand wheels, such a design aiming at permitting differential braking for cornering in the fields. Should in the latter case, the service braking system of the tractor fail, then the secondary braking system shall be able to fully or partially actuate the towed vehicle brakes. If this operation is achieved by a valve which is normally at rest, then such a valve may only be incorporated if its correct functioning can easily be checked by the driver, either from within the cab or from outside the vehicle, without the use of tools.
2.2.1.17.Additional requirements in the case of tractors authorised to draw towed vehicles with compressed-air braking systems.
2.2.1.17.1.In the event of a failure (e.g. breakage) in one of the pneumatic connecting lines, interruption or defect in the electric control line, it shall nevertheless be possible for the driver, fully or partially, to actuate the brakes of the towed vehicle by means either of the service braking control device or of the secondary braking control device or of the parking braking control device, unless the failure automatically causes the towed vehicle to be braked with the performance prescribed in point 3.2.3 of Annex II.
2.2.1.17.2.The automatic braking in point 2.2.1.17.1 shall be considered to be met when the following conditions are fulfilled:
2.2.1.17.2.1.
When the designated brake control device of the ones mentioned in point 2.2.1.17.1, is fully actuated, the pressure in the supply line shall fall to 150 kPa within the following two seconds; in addition, when the brake control device is released, the supply line shall be re-pressurised.
2.2.1.17.2.2.
When the supply line is evacuated at the rate of at least 100 kPa per second the automatic braking of the towed vehicle shall start to operate before the pressure in the supply line falls to 200 kPa.
2.2.1.17.3.In the event of a failure in one of the control lines connecting two vehicles equipped according to point 2.1.4.1.2, the control line not affected by the failure shall automatically ensure the braking performance prescribed for the towed vehicle in point 3.2.3 of Annex II.
2.2.1.17.4.In the case of a pneumatic service braking system comprising two or more independent sections, any leakage between those sections at or downstream of the control device shall be continuously vented to atmosphere.
2.2.1.18.Additional requirements in the case of tractors authorised to draw towed vehicles with hydraulic braking systems.
2.2.1.18.1.The pressure supplied at both coupling heads with the engine not running shall always be 0 kPa.
2.2.1.18.2.The pressure supplied at the coupling head of the control line with the engine running and no braking control force applied shall be 0+200 kPa.
2.2.1.18.3.With the engine running it shall be possible to generate at the coupling head of the supplementary line a pressure of at least 1 500 kPa but not exceeding 3 500 kPa
2.2.1.18.4.As a derogation from the requirement of point 2.2.1.16.1, a graduated braking action on the towed vehicle is only required when the service braking system of the tractor is actuated when the engine is running.
2.2.1.18.5.In the case of a failure (e.g. fracture or leak) in the supplementary line, it shall nevertheless be possible for the driver to fully or partially actuate the towed vehicle brakes, by means either of the service braking system control device or of the parking braking system control device, unless this failure automatically causes the towed vehicle to be braked with the performance prescribed in point 3.2.3 of Annex II.
2.2.1.18.6.In the case of a failure (e.g. fracture or leak) in the control line, the pressure in the supplementary line shall fall to 1 000 kPa within the following two seconds after the service brake control device has been fully actuated; in addition, when the service brake control device is released, the supplementary line shall be re-pressurised (see also point 2.2.2.15.3).
2.2.1.18.7.The pressure in the supplementary line shall fall from its maximum value to 0+300 kPa within the following second after the parking braking system control device has been fully actuated.
In order to check the evacuation time the supplementary line of the towed vehicle simulator according to point 3.6.2.1 of Annex III is connected to the supplementary line of the tractor.
The accumulators of the simulator are then charged to the maximum value generated by the tractor with the engine running and the bleeding device (point 1.1 of Appendix 2 of Annex III) fully closed.
2.2.1.18.8.In order to be able to connect and disconnect the hydraulic connecting lines even when the engine is running and the parking braking system applied, an appropriate device may be fitted on the tractor.
This device shall be so designed and constructed that the pressure in the connecting lines is positively restored to the rest position not later than the control (e.g. push button) of this device is automatically released (e.g. valve returns automatically into the normal operation position).
2.2.1.18.9.Tractors towing a vehicle of category R or S and which can only comply with the braking performance requirements of the service braking system and/or parking braking system and/or automatic braking system with the assistance of energy stored in a hydraulic energy storage device shall be equipped with an ISO 7638:2003 connector in order to be able to indicate the low level of stored energy on the towed vehicle, received by the latter, as laid down in point 2.2.2.15.1.1 by the separate warning signal via pin 5 of the electrical connector conforming to ISO 7638:2003 specified in point 2.2.1.29.2.2 (see also point 2.2.2.15.1). The ISO 7638:2003 connector may be used for 5 pin or 7 pin applications, as appropriate.
2.2.1.19.In the case of a tractor authorised to tow a vehicle of categories R3, R4 or S2, the service braking system of the towed vehicle may only be operated in conjunction with the service, secondary or parking braking system of the tractor. However, automatic application of the towed vehicle brakes alone is permitted where the operation of the towed vehicle brakes is initiated automatically by the tractor for the sole purpose of vehicle stabilisation.
2.2.1.19.1.By way of derogation from point 2.2.1.19, in order to improve the driving behaviour of the vehicle combination by modifying the coupling force between the tractor and towed vehicle, it is permissible that towed vehicle brakes are applied automatically up to a time of 5 s without the operation of the service, secondary or parking braking system of the tractor.
2.2.1.20.If point 3.1.3 of Annex II can only be fulfilled by complying with the conditions specified in point 3.1.3.4.1.1 of Annex II then
2.2.1.20.1.
in the case of compressed-air braking system, a control line pressure (or the equivalent digital demand) of at least 650 kPa shall be transmitted when a single control device is fully activated which also applies the tractor parking braking system. This shall also be ensured when the ignition/start switch has been switched off and/or the key has been removed;
2.2.1.20.2.
in the case of hydraulic braking system, when a single control device is fully activated a pressure of 0+100 kPa shall be generated on the supplementary line.
2.2.1.21.Anti-lock braking systems for tractors of category Tb
2.2.1.21.1.Tractors of category Tb with a maximum design speed exceeding 60 km/h shall be equipped with anti-lock braking systems of category 1 in accordance with the requirements of Annex XI.
2.2.1.21.2.Tractors of category Tb with a maximum design speed exceeding 40 km/h and not exceeding 60 km/h shall be equipped with anti-lock braking systems of category 1 in accordance with the requirements of Annex XI
(a)
for new vehicle types as from 1 January 2020; and
(b)
for new vehicles as from 1 January 2021.
2.2.1.22.Tractors authorised to tow a vehicle equipped with an anti-lock braking system shall also be equipped with a special electrical connector, conforming to ISO 7638:2003, for the electric control transmission. The ISO 7638:2003 connector may be used for 5 pin or 7 pin applications, as appropriate.
2.2.1.23.If tractors not mentioned in points 2.2.1.21.1 and 2.2.1.21.2 are fitted with anti-lock braking systems, they shall comply with the requirements of Annex XI.
2.2.1.24.The requirements of Annex X shall be applied to the safety aspects of all complex electronic vehicle control systems which provide or form part of the control transmission of the braking function included those which utilise the braking system(s) for automatically commanded braking or selective braking.
2.2.1.25.In the case of category Tb tractors with a maximum design speed exceeding 60 km/h, the service braking system shall, whether or not it is combined with the secondary braking system, be such that in the event of failure in a part of its transmission a sufficient number of wheels are still braked by actuation of the service brake control device; these wheels shall be so selected that the residual performance of the service braking system satisfies the requirements laid down in point 3.1.4 of Annex II.
The part or parts not affected by the failure shall be capable of partially or fully actuating the brakes of the towed vehicle.
2.2.1.25.1.The failure of a part of a hydraulic transmission system shall be signalled to the driver by a device comprising a warning signal, as specified in point 2.2.1.29.1.1. Alternatively, the lighting up of this device when the fluid in the reservoir is below a certain level specified by the manufacturer shall be permitted.
2.2.1.26.Special additional requirements for the electric transmission of the parking braking system
2.2.1.26.1.Tractors with a maximum design speed exceeding 60 km/h
2.2.1.26.1.1.In the case of a failure within the electric transmission, any unintended actuation of the parking braking system shall be prevented.
2.2.1.26.1.2.In the case of an electrical failure in the control or a break in the wiring within the electric control transmission external to the electronic control unit(s), excluding the energy supply, it shall remain possible to apply the parking braking system from the driver's seat and thereby be capable of holding the laden vehicle stationary on an 8 % up or down gradient.
2.2.1.26.2.Tractors with a maximum design speed not exceeding 60 km/h
2.2.1.26.2.1.In the case of an electrical failure in the control or a break in the wiring within the electric control transmission external to the control unit(s), excluding the energy supply,
2.2.1.26.2.1.1.
any unintended actuation of the parking braking system at a vehicle speed above 10 km/h shall be prevented;
2.2.1.26.2.1.2.
it shall remain possible to apply the parking braking system from the driver's seat and thereby be capable of holding the laden vehicle stationary on an 8 % up or down gradient.
2.2.1.26.3.Alternatively to the parking brake performance requirements according to points 2.2.1.26.1.2 and 2.2.1.26.2.1 an automatic actuation of the parking braking system is allowed when the vehicle is stationary, provided that the above performance is achieved and, once applied, the parking braking system remains engaged independently of the status of the ignition (start) switch. In this alternative, the parking braking system shall be automatically released as soon as the driver starts to set the vehicle in motion again.
2.2.1.26.4.It shall also be possible to release the parking braking system, if necessary by the use of tools and/or an auxiliary device carried/fitted on the vehicle.
2.2.1.26.5.A break in the wiring within the electric transmission, or an electric failure in the control device of the parking braking system shall be signalled to the driver by the yellow warning signal specified in point 2.2.1.29.1.2. When caused by a break in the wiring within the electric control transmission of the parking braking system, this yellow warning signal shall be signalled as soon as the break occurs or in the case of tractors with a maximum design speed not exceeding 60 km/h not later than on actuation of the relevant braking control. In addition, such an electric failure in the control device or break in the wiring external to the electronic control unit(s) and excluding the energy supply shall be signalled to the driver by flashing the warning signal specified in point 2.2.1.29.1.1 as long as the ignition (start) switch is in the ‘on’ (run) position including a period of not less than 10 seconds thereafter and the control device is in the ‘on’ (activated) position.
However, if the parking braking system detects correct clamping of the parking braking system, the flashing of the warning signal may be suppressed and the non-flashing red signal shall be used to indicate parking braking system applied.
Where actuation of the parking braking system is normally indicated by a separate warning signal, satisfying all the requirements of 2.2.1.29.3 this signal shall be used to satisfy the above requirement for a red signal.
2.2.1.26.6.Auxiliary equipment may be supplied with energy from the electric transmission of the parking braking system provided that the supply of energy is sufficient to allow the actuation of the parking braking system in addition to the vehicle electrical load under non-fault conditions. In addition, where the energy reserve is also used by the service braking system, the requirements of point 4.1.7 of Annex XII shall apply.
2.2.1.26.7.After the ignition/start switch which controls the electrical energy for the braking equipment has been switched off and/or the key removed, it shall remain possible to apply the parking braking system, whereas releasing shall be prevented.
Releasing of the parking braking system is permitted if the control has to be mechanically unlocked in order to be able to release the parking braking system.
2.2.1.27.The requirements of Annex XII shall be applied with regard to EBS vehicles or vehicles with ‘data communication’ via pin 6 and 7 of ISO 7638 connector.
2.2.1.28.Special requirements for coupling force control
2.2.1.28.1.Coupling force control is only permitted in the tractor.
2.2.1.28.2.The action of the coupling force control shall be to reduce the difference between the dynamic braking rates of tractors and towed vehicles. The operation of the coupling force control shall be checked at the time of type-approval. The method by which this check is carried out shall be agreed between the vehicle manufacturer and the technical service with the method of assessment and results being appended to the type-approval report.
2.2.1.28.2.1.The coupling force control may control the braking rate TM/FM (point 2 of Appendix 1 to Annex II) and/or the brake demand value(s) for the towed vehicle. In the case of a tractor equipped with two control lines according to point 2.1.4.1.2 of this Annex, both signals shall be subject to similar control adjustments.
2.2.1.28.2.2.The coupling force control shall not prevent the maximum possible braking pressure(s) from being applied.
2.2.1.28.3.The vehicle shall fulfil the laden compatibility requirements of Appendix 1 to Annex II, but to achieve the objectives of point 2.2.1.28.2 the vehicle may deviate from these requirements when the coupling force control is in operation.
2.2.1.28.4.A coupling force control failure shall be detected and indicated to the driver by a yellow warning signal such as that specified in point 2.2.1.29.1.2. In the event of a failure the relevant requirements of Appendix 1 to Annex II shall be fulfilled.
2.2.1.28.5.Compensation by the coupling force control system shall be indicated by means of the yellow warning signal specified in point 2.2.1.29.1.2 if this compensation exceeds 150 kPa (pneumatic) and 2 600 kPa (hydraulic) respectively away from the nominal demand value up to a limit, in pm, of 650 kPa (or the equivalent digital demand) and 11 500 kPa (hydraulic) respectively. Above the level of 650 kPa and 11 500 kPa (hydraulic) respectively the warning shall be given if the compensation causes the operating point to lie outside the laden compatibility band as specified in Appendix 1 to Annex II, for tractors.
2.2.1.28.6.A coupling force control system shall control only the coupling forces generated by the service braking system of the tractor and the towed vehicle. Coupling forces resulting from the performance of endurance braking systems shall not be compensated by the service braking system of either the tractor or towed vehicle. It is considered that endurance braking systems are not part of the service braking systems.
2.2.1.29.Brake failure and defect warning signal
The requirements for optical warning signals, whose function is to indicate to the driver certain specified failures or defects within the braking equipment of the tractor or of the towed vehicle, are set out in the points 2.2.1.29.1- 2.2.1.29.6.3. The function of these signals shall be exclusively to indicate failures or defects in the braking equipment. However, the optical warning signal described in point 2.2.1.29.6 may in addition be used to indicate failures or defects in the running gear.
2.2.1.29.1.Tractors shall be capable of providing optical brake failure and defect warning signals, as follows:
2.2.1.29.1.1.
A red warning signal, in accordance with the requirements laid down on the basis of Article 18(2)(l), (s), (q) and (4) of Regulation (EU) No 167/2013 indicating failures within the vehicle braking equipment, as specified in other points of this Annex and in Annexes V, VII, IX and XIII, which preclude achievement of the prescribed service braking performance or the functioning of at least one of two independent service braking circuits.
2.2.1.29.1.2.
Where applicable, a yellow warning signal, in accordance with the requirements laid down on the basis of Article 18(2)(l), (s), (q) and (4) of Regulation (EU) No 167/2013 indicating an electrically detected defect within the vehicle braking equipment, which is not indicated by the warning signal mentioned in point 2.2.1.29.1.1 above.
2.2.1.29.2.Tractors equipped with an electric control line and/or authorised to tow a vehicle equipped with an electric control transmission, shall be capable of providing a separate warning signal, in accordance with the requirements laid down on the basis of Article 18(2)(l), (s), (q) and (4) of Regulation (EU) No 167/2013 to indicate a defect within the electric control transmission of the braking equipment of the towed vehicle. The signal shall be activated from the towed vehicle via pin 5 of the electric connector conforming to ISO 7638:2003 and in all cases the signal transmitted by the towed vehicle shall be displayed without significant delay or modification by the tractor. This warning signal shall not light up when coupled to a towed vehicle without an electric control line and/or electric control transmission or when no towed vehicle is coupled. This function shall be automatic.
2.2.1.29.2.1.In the case of a tractor equipped with an electric control line, when electrically connected to a towed vehicle with an electric control line, the warning signal specified in point 2.2.1.29.1.1 shall also be used to indicate certain specified failures within the braking equipment of the towed vehicle, whenever the towed vehicle provides corresponding failure information via the data communication part of the electric control line. This indication shall be in addition to the warning signal specified in point 2.2.1.29.2. Alternatively, instead of utilising the warning signal specified in point 2.2.1.29.1.1 and the accompanying warning signal above, a separate warning signal, in accordance with the requirements laid down on the basis of Article 18(2)(l), (s), (q) and (4) of Regulation (EU) No 167/2013 may be provided in the tractor to indicate such a failure within the braking equipment of the towed vehicle.
2.2.1.29.2.2.Tractors equipped with an electric connector conforming to ISO 7638:2003 in order to be able to indicate the low level of stored energy on the towed vehicle as required by points 2.2.2.15.1.1 and 2.2.2.15.2 shall display the separate yellow warning signal mentioned in point 2.2.1.29.2 to the driver when the warning signal is transmitted to the tractor by the towed vehicle via pin 5 of the electric connector conforming to ISO 7638:2003.
2.2.1.29.3.Except where stated otherwise:
2.2.1.29.3.1.
a specified failure or defect shall be signalled to the driver by the above-mentioned warning signal(s) not later than on actuation of the relevant braking control device;
2.2.1.29.3.2.
the warning signal(s) shall remain displayed as long as the failure or defect persists and the ignition (start) switch is in the ‘on’ (run) position;
2.2.1.29.3.3.
the warning signal shall be constant (not flashing).
2.2.1.29.4.The warning signals shall be visible, even by daylight; the satisfactory condition of the signals shall be easily verifiable by the driver from the driver's seat; the failure of a component of the warning devices shall not entail any loss of the braking system's performance.
2.2.1.29.5.The warning signal(s) mentioned above shall light up when the electrical equipment of the vehicle (and the braking system) is energised. With the vehicle stationary, the braking system shall verify that none of the specified failures or defects are present before extinguishing the signals. Specified failures or defects which should activate the warning signals mentioned above, but which are not detected under static conditions, shall be stored upon detection and be displayed at start-up and at all times when the ignition (start) switch is in the ‘on’ (run) position, as long as the failure or defect persists.
2.2.1.29.6.Non-specified failures or defects or other information concerning the brakes or running gear of the tractor, may be indicated by the signal specified in point 2.2.1.29.1.2, provided that all the following conditions are fulfilled:
2.2.1.29.6.1.
the vehicle is stationary;
2.2.1.29.6.2.
after the braking system is first energised and the signal has indicated that, following the procedures detailed in point 2.2.1.29.5, no specified failures (or defects) have been identified; and
2.2.1.29.6.3.
non-specified faults or other information shall be indicated only by the flashing of the warning signal. However, the warning signal shall be extinguished by the time when the vehicle first exceeds 10 km/h.
2.2.1.30.Malfunctions of the electric control transmission shall not apply the brakes contrary to the driver's intentions.
2.2.1.31.Tractors fitted with hydrostatic drive shall either comply with all relevant requirements of this Annex or of Annex IX.
2.2.2.Vehicles of categories R and S
2.2.2.1.Vehicles of categories R1a, R1b (where the sum of the technically permissible masses per axle does not exceed 750 kg), S1a, S1b (where the sum of the technically permissible masses per axle does not exceed 750 kg) do not need to be fitted with a service braking system. However, if vehicles of these categories are equipped with a service braking system, this system shall comply with the same requirements as those of category R2 or S2 as appropriate.
2.2.2.2.Vehicles of categories R1b and S1b (where the sum of the technically permitted masses per axle exceeds 750 kg) and R2 shall be fitted with a service braking system either of the continuous or semi-continuous type or of the inertia type. However, if the vehicles of these categories have a service braking system of the continuous or semi-continuous type they shall meet the same requirements as those of category R3.
2.2.2.3.Where a towed vehicle belongs to category R3, R4 or S2, the service braking system shall be of a continuous or semi-continuous type.
2.2.2.3.1.By way of derogation from the requirement of point 2.2.2.3, an inertia braking system may be fitted to vehicles of category R3a and S2a with a maximum mass not exceeding 8 000 kg under the following conditions:
2.2.2.3.1.1
design speed not exceeding 30 km/h when the brakes act not on all wheels;
2.2.2.3.1.2
design speed not exceeding 40 km/h when the brakes act on all wheels;
2.2.2.3.1.3
a durable plate (150 mm in diameter) shall be fitted to the rear of trailers in category R3a, fitted with inertia brakes, indicating the maximum design speed. This shall read 30 or 40 km/h as applicable; or 20 or 25 mph in Member States where imperial units are still in use.
2.2.2.4.The service braking system:
2.2.2.4.1.
shall act at least on two wheels of each axle in the case of towed vehicle of categories Rb and Sb;
2.2.2.4.2.
shall distribute its action appropriately among the axles;
2.2.2.4.3.
shall contain in at least one of the air reservoirs, if fitted, a device for draining and exhausting in an adequate and easily accessible position.
2.2.2.5.The action of every braking system shall be distributed between the wheels of each axle symmetrically in relation to the longitudinal median plane of the towed vehicle.
2.2.2.5.1.However, in the case of vehicle with significantly different wheel loads on the left and right vehicle side, the action of the braking system may deviate from the symmetrical brake force distribution accordingly.
2.2.2.6.Malfunctions of the electric control transmission shall not apply the brakes contrary to the driver's intentions.
2.2.2.7.The braking surfaces required to attain the prescribed degree of effectiveness shall be in constant contact with the wheels, either rigidly or through components not liable to failure.
2.2.2.8.Wear of the brakes shall be capable of being easily taken up by means of a system of manual or automatic adjustment. In addition, the control device and the components of the transmission and of the brakes shall possess a reserve of travel and, if necessary, suitable means of compensation such that, when the brakes become heated, or the brake linings have reached a certain degree of wear, effective braking is ensured without immediate adjustment being necessary.
2.2.2.8.1.Wear adjustment shall be automatic for the service brakes. However, the fitting of automatic adjustment devices is optional for vehicles of categories R1, R2, R3a, S1 and S2a. Brakes equipped with automatic brake adjustment devices shall, after heating followed by cooling, be capable of free running as specified in point 2.5.6. of Annex II following the type-I or type-III test also defined in that Annex as appropriate.
2.2.2.8.1.1.In the case of towed vehicles of categories:
R3a, R4a, S2a, and
R3b, R4b, S2b where the sum of the technically permissible masses per axle does not exceed 10 000 kg,
the performance requirements of point 2.2.2.8.1 shall be deemed to be satisfied by fulfilling the requirements of point 2.5.6 of Annex II. Until uniform technical provisions have been agreed that correctly assess the function of the automatic brake adjustment device, the free running requirement shall be deemed to be fulfilled when free running is observed during all brake tests prescribed for the relevant trailer.
2.2.2.8.1.2.In the case of towed vehicles of categories R3b, R4b, S2b where the sum of the technically permissible masses per axle exceeds 10 000 kg, the performance requirements of point 2.2.2.8.1 shall be deemed to be satisfied by fulfilling the requirements of point 2.5.6 of Annex II.
2.2.2.9.The braking system shall be such that the towed vehicle is stopped automatically if the coupling separates while the towed vehicle is in motion.
2.2.2.9.1.Vehicles of categories R1 and S1, without a braking system, shall be equipped, in addition to the main coupling device, with a secondary coupling (chain, cable etc.) capable, in the event of separation of the main coupling, of preventing the drawbar from touching the ground and providing some residual steering action on the towed vehicle.
2.2.2.9.2.Vehicles of categories R1, R2, R3a, S1 and S2a where an inertia braking system is fitted shall be equipped with a device (chain, cable etc.) capable, in the event of separation of the coupling, of applying the towed vehicle brakes.
2.2.2.9.3.On towed vehicles with a hydraulic braking system the connecting lines, as specified in points 2.1.5.1.1 and 2.1.5.1.2 shall disconnect on the tractor or on the towed vehicle with an insignificant leakage during the separation of the coupling. The force to disconnect a single connection line shall not exceed the values specified in ISO 5675:2008. Deviating from the values prescribed in paragraph 4.2.4 of this standard, the disconnecting force for both lines shall not exceed 2 500 N.
2.2.2.10.On every towed vehicle which is required to be fitted with a service braking system, parking braking shall be ensured even when the towed vehicle is separated from the tractor. It shall be possible for a person standing on the ground to actuate the parking braking system.
2.2.2.11.If the towed vehicle is fitted with a device enabling actuation of the braking system to be cut out, other than the parking braking system, the device shall be so designed and constructed that it is positively restored to the ‘at rest’ position not later than on the resumption of the supply of compressed air or hydraulic oil or electrical supply to the towed vehicle.
2.2.2.12.On every towed vehicle which is fitted with a hydraulic service braking system the braking system shall be so designed such that when the supplementary line is disconnected the parking or service braking system shall be automatically applied.
2.2.2.13.Vehicles of categories R3, R4 and S2 shall satisfy the conditions specified in point 2.2.1.17.2.2 for compressed-air braking systems or in point 2.2.2.15.3 for hydraulic braking systems respectively.
2.2.2.14.Where the auxiliary equipment is supplied with energy from the service braking system, the service braking system shall be protected to ensure that the pressure in the service brake storage device(s) is maintained at a pressure of at least 80 % of the control line demand pressure or equivalent digital demand as specified respectively in points 2.2.3.2 and 2.2.3.3 of Annex II.
2.2.2.15.In addition to the above, towed vehicles with hydraulic braking systems shall comply with the following:
2.2.2.15.1.
In the case that a towed vehicle only complies with the requirements of the service braking system and/or parking braking system and/or automatic braking with the assistance of energy stored in a hydraulic energy storage device, the towed vehicle shall automatically apply the brakes or remain braked when it is not electrically connected (ignition of tractor is switched on) with the energy supply available from the ISO 7638:2003 connector (see also point 2.2.1.18.9). The ISO 7638:2003 connector may be used for 5 pin or 7 pin applications, as appropriate.
2.2.2.15.1.1.
When the pressure in the hydraulic energy storage devices falls below a pressure declared by the vehicle manufacturer in the type-approval certificate where the prescribed braking performance(s) is (are) not ensured this low pressure shall be indicated to the driver by the separate warning signal specified in point 2.2.1.29.2.2 via pin 5 of the electrical connector conforming to ISO 7638:2003.
This pressure shall not exceed 11 500 kPa
2.2.2.15.2.
When the supplementary line has fallen to a pressure of 1 200 kPa the automatic braking of the towed vehicle shall start (see also point 2.2.1.18.6).
2.2.2.15.3.
A device may be installed on the towed vehicle to temporary release the brakes in the case that no suitable tractor is available. The supplementary line shall be connected to this device for this temporary purpose. When the supplementary line is disconnected from this device the brakes shall return automatically to the applied condition again.
2.2.2.16.Towed vehicles with a maximum design speed exceeding 60 km/h of categories R3b, R4b and S2b shall be equipped with an anti-lock braking system in accordance with Annex XI. Additionally, if the maximum permissible mass of the towed vehicles exceeds 10 t only an anti-lock braking system of category A is permitted.
2.2.2.17.If towed vehicles not mentioned in point 2.2.2.16 are fitted with anti-lock braking systems, they shall comply with the requirements of Annex XI.
2.2.2.18.Towed vehicles equipped with an electric control line and R3b or R4b category towed vehicles equipped with an anti-lock braking system, shall be fitted with a special electrical connector for the braking system and anti-lock braking system or only for one of those two systems, conforming to ISO 7638:2003. The conductor cross sections specified in ISO 7638:2003 for the trailer may be reduced if the trailer is installed with its own independent fuse. The rating of the fuse shall be such that the current rating of the conductors is not exceeded. This derogation shall not apply to trailers equipped to tow another trailer. Failure warning signals required from the towed vehicle by this Regulation shall be activated via the above connector. The requirement to be applied to towed vehicles with respect to the transmission of failure warning signals shall be those, as appropriate, which are prescribed for tractors in points 2.2.1.29.3, 2.2.1.29.4, 2.2.1.29.5 and 2.2.1.29.6.
Those vehicles shall be marked in indelible form, in accordance with the requirements laid down on the basis of Article 17(2)(k) and (5) of Regulation (EU) No 167/2013, to indicate the functionality of the braking system when the ISO 7638:2003 connector is connected and disconnected. The marking is to be positioned so that it is visible when connecting the pneumatic and electrical interface connections.
2.2.2.18.1.It is permitted to connect the braking system to a power supply in addition to that available from the ISO 7638:2003 connector above. However, when an additional power supply is available the following provisions shall apply:
2.2.2.18.1.1.
in all cases the ISO 7638:2003 power supply is the primary power source for the braking system, irrespective of any additional power supply that is connected. The additional supply is intended to provide a backup should a failure of the ISO 7638:2003 power supply occur;
2.2.2.18.1.2.
it shall not have an adverse effect on the operation of the braking system under normal and failed modes;
2.2.2.18.1.3.
in the event of a failure of the ISO 7638:2003 power supply the energy consumed by the braking system shall not result in the maximum available power from the additional supply being exceeded;
2.2.2.18.1.4.
the towed vehicle shall not have any marking or label to indicate that the towed vehicle is equipped with an additional power supply;
2.2.2.18.1.5.
a failure warning device is not permitted on the towed vehicle for the purposes of providing a warning in the event of a failure within the towed vehicle braking system when the braking system is powered from the additional supply;
2.2.2.18.1.6.
when an additional power supply is available it shall be possible to verify the operation of the braking system from this power source;
2.2.2.18.1.7.
should a failure exist within the electrical supply of energy from the ISO 7638:2003 connector the requirements of points 4.2.3 of Annex XII and 4.1 of Annex XI with respect to failure warning shall apply irrespective of the operation of the braking system from the additional power supply.
2.2.2.19.In addition to the requirements of points 2.2.1.17.2.2 and 2.2.1.19, the brakes of the towed vehicle may also be applied automatically when this is initiated by the towed vehicle braking system itself following the evaluation of on-board generated information.
3. Tests
Braking tests which the vehicles submitted for approval are required to undergo, and the braking performance required, are described in Annex II.
ANNEX II Requirements applying to testing and performance of braking systems and trailer braking couplings and of vehicles fitted with them
1. Definitions
For the purposes of this Annex:
1.1.
‘axle group’ means multiple axles where the axle spread between one axle and its adjacent axle is equal to or less than 2,0 m. Where the axle spread between one axle and its adjacent axle is greater than 2,0 m, each individual axle shall be considered as an independent axle group.
1.2.
‘adhesion utilisation curves’ of a vehicle means curves showing, for specified load conditions, the adhesion utilised by each axle i plotted against the braking rate of the vehicle.
2. Braking tests
2.1.General
The maximum design speed is considered, throughout this Annex, to be in the forward direction of the vehicle travel, unless otherwise explicitly mentioned.
2.1.1.The performance prescribed for braking systems shall be based on the stopping distance and the mean fully developed deceleration or only on one of those two quantities. The performance of a braking system shall be determined by measuring the stopping distance in relation to the initial speed of the vehicle and by measuring the mean fully developed deceleration during the test or only on one of those two quantities. Both stopping distance and mean fully developed deceleration or only one of them shall be prescribed and measured, following to the test to be performed.
2.1.2.The stopping distance shall be the distance covered by the vehicle from the moment when the driver begins to actuate the control device of the braking system until the moment when the vehicle stops; the initial vehicle speed (v1) shall be the speed at the moment when the driver begins to actuate the control device of the braking system; the initial speed shall not be less than 98 % of the prescribed speed for the test in question. The mean fully developed deceleration dm shall be calculated as the deceleration averaged with respect to distance over the interval vb to ve according to the following formula:

Where:
v1
=
initial vehicle speed calculated as described in the first subparagraph
vb
=
vehicle speed at 0,8 v1 in km/h
ve
=
vehicle speed at 0,1 v1 in km/h
sb
=
distance travelled between v1 and vb in metres
se
=
distance travelled between v1 and ve in metres
The speed and distance shall be determined using instrumentation having an accuracy of ± 1 % at the prescribed speed for the test. The dm may be determined by other methods than the measurement of speed and distance; in this case, the accuracy of the dm shall be within ± 3 %.
2.1.3.For the type-approval of any vehicle, the braking performance shall be measured during road tests conducted in the following conditions:
2.1.3.1.
The vehicle's condition as regards mass shall be as prescribed for each type of test and be specified in the test report.
2.1.3.2.
The test shall be carried out at the speeds prescribed for each type of test; if the maximum design speed of a vehicle is lower than the speed prescribed for a test, the test shall be performed at the vehicle's maximum design speed.
2.1.3.3.
During the tests, the force applied to the control device of the braking system in order to obtain the prescribed performance shall not exceed 600 N on the foot or 400 N on the hand operated control devices.
2.1.3.4.
The road shall have a surface affording good adhesion, unless specified otherwise.
2.1.3.5.
The tests shall be performed when there is no wind liable to affect the results.
2.1.3.6.
At the start of the tests the tyres shall be cold and at the pressure prescribed for the load actually borne by the wheels when the vehicle is stationary.
2.1.3.7.
The prescribed performance shall be obtained without deviation of the vehicle from its course, without abnormal vibrations and without wheel-locking. Wheel-locking is permitted where specifically mentioned.
2.1.4.Behaviour of the vehicle during braking
2.1.4.1.In braking tests, and in particular in those at high speed, the general behaviour of the vehicle during braking shall be checked.
2.1.4.2.Behaviour of the vehicle during braking on a road on which adhesion is reduced.
The behaviour of vehicles of categories Tb, R2b, R3b, R4b and S2b on a road on which adhesion is reduced, shall meet the relevant requirements of Appendix 1 and, if the vehicle is equipped with ABS, of Annex XI too.
2.2.Type-0 braking test (ordinary performance test with brakes cold)
2.2.1.General
2.2.1.1.The brake shall be cold. A brake is deemed to be cold when one of the following conditions is met:
2.2.1.1.1.
The temperature measured on the disc or on the outside of the drum is below 100 °C.
2.2.1.1.2.
In the case of totally enclosed brakes, including oil immersed brakes, the temperature measured on the outside of the housing is below 50 °C.
2.2.1.1.3.
The brakes have not been used for one hour before the test.
2.2.1.2.During the braking test, an axle without a brake, when this axle is capable of being declutched, shall not be connected with a braked axle. However, in case of tractors with one braked axle and an automatic engagement of the drive to all other axles during braking, all wheels are deemed to be braked.
2.2.1.3.The test shall be conducted under the following conditions:
2.2.1.3.1.
The vehicle shall be laden to its maximum permissible mass specified by the manufacturer and with an unbraked axle loaded to its maximum permissible mass. The braked axle wheels shall be fitted with the largest diameter tyres intended by the manufacturer for that vehicle type when carrying the maximum permissible mass. For vehicles braking on all wheels, the front axle shall be laden to its maximum permissible mass.
2.2.1.3.2.
The test shall be repeated on an unladen vehicle; in case of tractors, carrying only the driver and if necessary a person responsible for monitoring the results of the test.
2.2.1.3.3.
The limits prescribed for minimum performance, both for tests with the vehicle unladen and for tests with the vehicle laden, are those laid down hereunder for each category of vehicle, the vehicle shall satisfy both the prescribed stopping distance and the prescribed mean fully developed deceleration for the relevant vehicle category, but it may not be necessary to actually measure both parameters.
2.2.1.3.4.
The road shall be level.
2.2.2.Type-0 test for categories T and C vehicles
2.2.2.1.The test shall be carried out at the maximum design speed of the vehicle, with the engine disconnected. This speed may be subject to a certain margin of tolerance. However, in any case the minimum prescribed performance shall be attained. The prescribed maximum stopping distance (by the stopping distance formula) shall be calculated with the actual test speed.
2.2.2.2.To check compliance with the requirements of point 2.2.1.2.4 of Annex I, a type-0 test shall be carried out with the engine disconnected at the initial speed of not less than 98 % of the maximum design speed of the vehicle. The mean fully developed deceleration on application of the control device of the parking braking system or on application of an auxiliary control device, which permits at least partial actuation of the service braking system and the deceleration immediately before the vehicle stops shall not be less than 1,5 m/s2 up to 30 km/h and 2,2 m/s2 above 30 km/h. The test shall be carried out with the laden vehicle. The force exerted on the braking control device shall not exceed the specified values.
2.2.2.3.In the case of vehicles equipped with handlebar and straddle seat or equipped with steering wheel and bench seat or bucket seats in one or more rows, that are also equipped with non-disengageable transmission, as this can be proved by the manufacturer at the braking testing, the vehicle shall complete the Type-0 test with the engine connected.
2.2.3.Type-0 test for categories R and S vehicles:
2.2.3.1.The braking performance of the towed vehicle can be calculated either from the braking rate of the tractor plus the towed vehicle and the measured thrust on the coupling or, in certain cases, from the braking rate of the tractor plus the towed vehicle with only the towed vehicle being braked. The engine of the tractor shall be disconnected during the braking test.
2.2.3.2.If the towed vehicle is fitted with a compressed-air braking system, the pressure in the supply line shall not exceed 700 kPa during the brake test and the signal value in the control line shall not exceed the following values, depending on the installation:
2.2.3.2.1.
650 kPa in the pneumatic control line;
2.2.3.2.2.
A digital demand value corresponding to 650 kPa (as defined in ISO 11992:2003 including ISO 11992-2:2003 and its Amd.1:2007 in the electric control line.
2.2.3.3.If the towed vehicle is fitted with a hydraulic braking system:
2.2.3.3.1.
The prescribed minimum braking performance shall be achieved with a pressure at the coupling head of the control line not exceeding 11 500 kPa
2.2.3.3.2.
The maximum pressure delivered at the coupling head of the control line shall not exceed 15 000 kPa.
2.2.3.4.With the exception of cases according to points 2.2.3.5 and 2.2.3.6, it is necessary for the determination of the braking rate of the towed vehicle to measure the braking rate of the tractor plus the towed vehicle and the thrust on the coupling. The tractor shall meet the requirements laid down in Appendix 1 with regard to the relation between the ratio TM/FM and the pressure pm,
where:
TM
=
sum of braking forces at the periphery of all wheels of tractors
FM
=
total normal static reaction of road surface on wheels of tractors
pm
=
pressure at coupling head of control line
The braking rate of the towed vehicle shall be calculated according to the following formula:
zR = zR + M + D/FR
Where:
zR
=
braking rate of the towed vehicle
zR + M
=
braking rate of the tractor plus the towed vehicle
D
=
thrust on the coupling (tractive force D > 0; compressive force D < 0)
FR
=
total normal static reaction of road surface on all wheels of towed vehicle
2.2.3.5.If a towed vehicle has a continuous or semi-continuous braking system where the pressure in the brake actuators does not change during braking despite the dynamic axle load shifting, the towed vehicle alone may be braked. The braking rate zR of the towed vehicle shall be calculated according to the following formula:

Where:
R
=
rolling resistance value:
0,02 in the case of vehicles with a maximum design speed not exceeding 40 km/h
0,01 in the case of vehicles with a maximum design speed exceeding 40 km/h
FM
=
total normal static reaction of road surface on wheels of tractors
FR
=
total normal static reaction of road surface on all wheels of towed vehicle
2.2.3.6.Alternatively, the evaluation of the braking rate of the towed vehicle may be done by braking the towed vehicle alone. In this case the pressure used shall be the same as that measured in the brake actuators during the braking of the combination.
2.3.Type-I test (fade test)
This test type shall be performed according to the requirements of points 2.3.1 or 2.3.2, as applicable.
2.3.1.With repeated braking
Tractors of categories T and C shall undergo the Type-I test with repeated braking.
2.3.1.1.The service braking system of tractors covered by this Regulation shall be tested by successively applying and releasing the brakes a number of times. The vehicle shall be fully laden and tested in accordance with the conditions shown in the following table:

Where
v1
=
speed at start of braking
v2
=
speed at end of braking
vmax
=
maximum design speed of vehicle
n
=
number of brake applications
Δt
=
duration of the braking cycle (time elapsing between the initiation of one brake application and the initiation of the next).
2.3.1.1.1.In the case of tractors with a maximum design speed not exceeding 40 km/h, as an alternative to the test conditions as shown in the table of point 2.3.1.1 the conditions shown in the following table may be applied:
| Vehicle category | Conditions | |||
|---|---|---|---|---|
| v1 [km/h] | v2 [km/h] | Δt [sec] | n | |
| T, C | 80 % vmax | 0,05 v1 | 60 | 18 |
2.3.1.2.If the characteristics of the vehicle do not allow for the period of time prescribed for Δt, the duration may be increased; in any event, in addition to the time necessary for braking and accelerating the vehicle, a period of 10 seconds shall be allowed in each cycle for stabilising the speed v1.
2.3.1.3.In these tests, the force applied to the control device shall be so adjusted as to attain a mean fully developed deceleration of 3 m/s2 at the first application of the brakes. This force shall remain constant throughout the succeeding brake applications.
2.3.1.4.During brake applications the highest gear ratio (excluding overdrive, etc.) shall be continuously engaged.
2.3.1.5.For regaining speed after braking, the gearbox shall be used in such a way as to attain the speed v1 in the shortest possible time (maximum acceleration allowed by the engine and gearbox).
2.3.1.6.In the case of vehicles equipped with automatic brake adjustment devices the adjustment of the brakes shall, prior to the type-I test above, be set according to the following procedures as appropriate:
2.3.1.6.1.
In the case of vehicles equipped with air operated brakes the adjustment of the brakes shall be such as to enable the automatic brake adjustment device to function. For this purpose the actuator stroke shall be adjusted to:
so ≥ 1,1 × sre-adjust
(the upper limit shall not exceed a value recommended by the manufacturer)
Where:
S re-adjust
is the re-adjustment stroke according to the specification of the manufacturer of the automatic brake adjustment device, i.e. the stroke, where it starts to readjust the running clearance of the brake with an actuator pressure of 15 per cent of the brake system operating pressure but not less than 100 kPa.
Where, by agreement with the technical service, it is impractical to measure the actuator stroke, the initial setting shall be agreed with the technical service.
From the above condition the brake shall be operated with an actuator pressure of 30 % of the brake system operating pressure but not less than 200 kPa 50 times in succession. This shall be followed by a single brake application with an actuator pressure of > 650 kPa.
2.3.1.6.2.
In the case of vehicles equipped with hydraulically operated disc brakes no setting requirements are deemed necessary.
2.3.1.6.3.
In the case of vehicles equipped with hydraulically operated drum brakes the adjustment of the brakes shall be as specified by the manufacturer.
2.3.2.With continuous braking
2.3.2.1.The service braking system of vehicles of categories R1, R2, S1, R3a, R4a, S2a and R3b, R4b, S2b, where the sum of the technically permissible masses per axle does not exceed 10 000 kg for the three last vehicles' categories
When the above mentioned vehicles R3a, R4a, S2a and R3b, R4b, S2, where the sum of the technically permissible masses per axle does not exceed 10 000 kg for the three last vehicles' categories, have not passed alternatively the Type-III test according to point 2.5 shall be tested in such a manner that, the vehicle being laden, the energy input to the brakes is equivalent to that recorded in the same period of time with a laden vehicle driven at a steady speed of 40 km/h on a 7 % down-gradient for a distance of 1,7 km.
2.3.2.2.The test may be carried out on a level road, the trailed vehicle being towed by an agricultural vehicle; during the test, the force applied to the control device shall be adjusted so as to keep the resistance of the towed vehicle constant (7 % of the maximum stationary axle load of the towed vehicle). If the power available for hauling is insufficient, the test can be conducted at a lower speed but over a greater distance; as shown in the following table:
| Speed (km/h) | distance (in m) |
|---|---|
| 40 | 1 700 |
| 30 | 1 950 |
| 20 | 2 500 |
| 15 | 3 100 |
2.3.2.3.In the case of towed vehicles equipped with automatic brake adjustment devices the adjustment of the brakes shall, prior to the Type-I test prescribed above, be set according to the procedure as laid down in point 2.5.4.
2.3.3.Hot performance
2.3.3.1.At the end of the type-I test (test described in point 2.3.1 or test described in point 2.3.2) the hot performance of the service braking system shall be measured in the same conditions (and in particular at a constant control force no greater than the mean force actually used) as for the type-0 test with the engine disconnected (the temperature conditions may be different).
2.3.3.2.For tractors this hot performance shall not be less than 80 % of that prescribed for the category in question, nor less than 60 % of the figure recorded in the type-0 test with the engine disconnected.
2.3.3.3.In the case of towed vehicles, the hot brake force at the periphery of the wheels when tested at 40 km/h shall not be less than 36 % of towed vehicles with vmax > 30 km/h or 26 % of towed vehicles with vmax ≤ 30 km/h of the maximum stationary wheel load, nor less than 60 % of the figure recorded in the type 0 test at the same speed.
2.3.4.Free running test
In the case of tractors equipped with automatic brake adjustment devices, the brakes after completing the tests described in point 2.3.3 shall be allowed to cool to a temperature representative of a cold brake (i.e. ≤ 100 °C) and it shall be verified that the vehicle is capable of free running by fulfilling one of the following conditions:
2.3.4.1.
Wheels are running freely (i.e. may be rotated by hand);
2.3.4.2.
It is ascertained that when the vehicle is driven at a constant speed of v = 60 km/h with the brakes released the asymptotic temperatures shall not exceed a drum/disc temperature increase of 80 °C, then the residual brake moments are regarded as acceptable.
2.4.Type-II test (downhill behaviour test)
In addition to the type-I test, tractors of categories Tb and Cb having a maximum permissible mass exceeding 12 t, shall also undergo the type-II test.
2.4.1.Laden tractor shall be tested in such a manner that the energy input is equivalent to that recorded in the same period of time with a laden tractor driven at an average speed of 30 km/h on a 6 % down-gradient for a distance of 6 km, with the appropriate gear engaged and the endurance braking system, if the vehicle is equipped with one, being used. The gear engaged shall be such that the speed of the engine (min-1) does not exceed the maximum value prescribed by the manufacturer.
2.4.2.For vehicles in which the energy is absorbed by the braking action of the engine alone, a tolerance of ± 5 km/h on the average speed shall be permitted, and the gear enabling the speed to be stabilised at the value closest to 30 km/h on the 6 % down-gradient shall be engaged. If the performance of the braking action of the engine alone is determined by a measurement of deceleration, it shall be sufficient if the mean deceleration measured is at least 0,5 m/s2.
2.4.3.At the end of the test, the hot performance of the service braking system shall be measured in the same conditions as for the type-0 test with the engine disconnected (the temperature conditions may be different). This hot performance shall give a stopping distance not exceeding the following values and a mean fully developed deceleration not less than the following values, using a control force not exceeding 60 daN:
| 0,15 v + (1,33 v2/115) | (the second term corresponds to a mean fully developed deceleration dm = 3,3 m/s2). |
2.5.Type-III test (fade test) for laden vehicles of categories:
2.5.1.R3b, R4b, S2b where the sum of the technically permissible masses per axle exceeds 10 000 kg
or alternatively of categories
2.5.2.R3a, R4a, S2a, when these vehicles have not been tested according to point 2.3.2.
2.5.3.R3b, R4b, S2b where the sum of the technically permissible masses per axle does not exceed 10 000 kg.
2.5.4.Track test
2.5.4.1.The adjustment of the brakes shall, prior to the type-III test below, be set according to the following procedures as appropriate:
2.5.4.1.1.
In the case of towed vehicles equipped with air operated brakes the adjustment of the brakes shall be such as to enable the automatic brake adjustment device to function. For this purpose the actuator stroke shall be adjusted to:
so ≥ 1,1 × sre-adjust
(the upper limit shall not exceed a value recommended by the manufacturer)
Where:
sre-adjust
is the re-adjustment stroke according to the specification of the manufacturer of the automatic brake adjustment device, i.e. the stroke, where it starts to readjust the running clearance of the brake with an actuator pressure of 100 kPa.
Where, by agreement with the technical service, it is impractical to measure the actuator stroke, the initial setting shall be agreed with the technical service.
From the above condition the brake shall be operated with an actuator pressure of 200 kPa, 50 times in succession. This shall be followed by a single brake application with an actuator pressure of ≥ 650 kPa.
2.5.4.1.2.
In the case of towed vehicles equipped with hydraulically operated disc brakes no setting requirements are deemed necessary.
2.5.4.1.3.
In the case of towed vehicles equipped with hydraulically operated drum brakes the adjustment of the brakes shall be as specified by the manufacturer.
2.5.4.2.For the road test the conditions shall be as follows:
| Number of brake applications | 20 |
|---|---|
| Duration of a braking cycle | 60 s |
| Initial speed at the beginning of braking | 60 km/h |
| Braking applications | In these tests, the force applied to the control device shall be so adjusted as to attain the mean fully developed deceleration of 3 m/s2 in respect to the towed vehicle mass PR at the first brake application; this force shall remain constant throughout the succeeding brake applications. |
The braking rate of a towed vehicle is calculated according to the formula given in point 2.2.3.5:

The speed at the end of braking:

Where:
zR
=
braking rate of the towed vehicle,
zR + M
=
braking rate of the vehicle combination (tractor and towed vehicle),
R
=
rolling resistance value = 0,01
FM
=
total normal static reaction between the road surface and the wheels of tractor (N),
FR
=
total normal static reaction between the road surface and the wheels of towed vehicle (N),
F1
=
normal static reaction of the part of the mass of the towed vehicle borne by the unbraked axle(s) (N),
F2
=
normal static reaction of the part of the mass of the towed vehicle borne by the braked axle(s) (N),
PR
=
PR = FR/g
v1
=
initial speed (km/h),
v2
=
final speed (km/h).
2.5.5.Hot performance
At the end of the test according to point 2.5.4, the hot performance of the service braking system shall be measured under the same conditions as for the Type-0 test with, however, different temperature conditions and starting from an initial speed of 60 km/h. The hot brake-force at the periphery of the wheels shall then not be less than 40 % of the maximum stationary wheel load, and not less than 60 per cent of the figure recorded in the Type-0 test at the same speed.
2.5.6.Free running test
After completing the tests described in point 2.5.5, the brakes shall be allowed to cool to a temperature representative of a cold brake (i.e. < 100 °C) and it shall be verified that the towed vehicle is capable of free running by fulfilling one of the following conditions:
2.5.6.1.
Wheels are running freely (i.e. may be rotated by hand);
2.5.6.2.
It is ascertained that when the towed vehicle is driven at a constant speed of v = 60 km/h with the brakes released the asymptotic temperatures shall not exceed a drum/disc temperature increase of 80 °C, then the residual brake moments are regarded as acceptable.
3. Performances of the braking systems
3.1.Vehicles of category T and C
3.1.1.Service braking systems
3.1.1.1.Under Type-0 conditions, the service braking system shall be tested under the conditions shown in the following table
| vmax ≤ 30 km/h | vmax > 30 km/h | |
|---|---|---|
| v | = vmax | = vmax |
| s (metres) | ≤ 0,15 v + v2/92 | ≤ 0,15 v + v2/130 |
| dm | ≥ 3,55 m/s2 | ≥ 5 m/s2 |
| F (foot operated control) | ≤ 600 N | ≤ 600 N |
| F (hand operated control) | ≤ 400 N | ≤ 400 N |
where:
vmax
=
maximum design speed of the vehicle
v
=
prescribed test speed
s
=
Stopping distance
dm
=
mean fully developed deceleration
F
=
force applied to the control device
3.1.1.2.In the case of a tractor authorised to tow an unbraked vehicle of categories R or S, the minimum performance prescribed for the corresponding tractor (for the type-0 test with engine disconnected) shall be attained with the unbraked towed vehicle coupled to the tractor and with the unbraked towed vehicle laden to the maximum mass declared by the tractor manufacturer.
The combination performance shall be verified by calculations referring to the maximum braking performance actually achieved by the tractor alone during the Type-0 test with the engine disconnected for the laden and unladen tractor (optionally also for a partially laden condition defined by the tractor manufacturer), using the following formula (no practical tests with a coupled unbraked towed vehicle are required):

Where:
dM + R
=
calculated mean fully developed deceleration of the tractor when coupled to an unbraked towed vehicle, in m/s2,
dM
=
maximum mean fully developed deceleration of the tractor alone achieved during the Type-0 test with engine disconnected, in m/s2,
PM
=
mass of the tractor (if applicable, including any ballast and/or supporting load)
PM_laden
=
mass of the tractor, laden
PM_par_laden
=
mass of the tractor, partial laden
PM_unladen
=
mass of the tractor, unladen
PR
=
part of the maximum mass borne by the axle(s) of a towed vehicle without a service brake which may be coupled (as declared by the tractor manufacturer)
‘PM + R’
=
combination mass (mass ‘PM’ + declared unbraked towed vehicle mass PR)
3.1.1.2.1.Required minimum combination performance
The minimum combination performance shall be not less than 4,5 m/s2 in the case of tractors with vmax > 30 km/h and not less than 3,2 m/s2 in the case of tractors with vmax ≤ 30 km/h for the laden und unladen conditions. At the discretion of the tractor manufacturer, an additional type-0 test may be carried out by the technical service for a partial laden tractor mass declared by the manufacturer in order to define the maximum permitted unbraked towed vehicle mass fulfilling the required minimum combination performance for such ‘combination mass’.
The measured figures ‘dm’ for the above mentioned load conditions and the corresponding calculated figures ‘dM + R’ shall be recorded in the test report.
The maximum declared figure for the unbraked towed vehicle mass shall not exceed 3 500 kg.
3.1.2.Secondary braking system
The secondary braking system, even if the control device which actuates it is also used for other braking functions, shall give a stopping distance not exceeding the following values and a mean fully developed deceleration not less than the following values:
| Tractors with vmax ≤ 30 km/h: | 0,15 v + (v2/39) |
| (the second term corresponds to a mean fully developed deceleration dm = 1,5 m/s2) | |
| Tractors with vmax > 30 km/h: | 0,15 v + (v2/57) |
| (the second term corresponds to a mean fully developed deceleration dm = 2,2 m/s2) | |
The prescribed performance shall be obtained by applying to the control device a force not exceeding 600 N on a foot or 400 N on a hand operated control device. The control device shall be so placed that it can be easily and quickly applied by the driver.
3.1.3.Parking braking system
3.1.3.1.The parking braking system shall, even if it is combined with one of the other braking devices, be capable of holding a laden tractor on an 18 % up and down gradient. This requirement shall be fulfilled even during the cooling period. The cooling period is deemed to terminate when the brakes have reached a temperature of 10 °C above ambient.
3.1.3.2.For vehicles of category T4.3, the parking braking system shall, even if it is combined with one of the other braking devices, be capable of holding a laden tractor on a 40 % up and down gradient. This requirement shall be fulfilled even during the cooling period. The cooling period is deemed to terminate when the brakes have reached a temperature of 10 °C above ambient.
3.1.3.3.Hot and cold parking braking performance test
In order to verify that the parking brake is capable of holding a laden tractor on an up and down gradient as required by points 3.1.3.1 and 3.1.3.2, the measurements shall be done under the following conditions:
Heating up the brakes on a temperature ≥ 100 °C (measured at the rubbing surface of the disc or at the outside of the drum),
Hot static parking braking system test at a temperature ≥ 100 °C,
Cold static parking braking system test at a temperature ≤ ambient temperature + 10 °C.
In the case of oil immersed brakes, the method by which this check is carried out shall be agreed between the vehicle manufacturer and the technical service. The method of assessment and results shall be appended to the type approval report.
3.1.3.4.On tractors to which the coupling of towed vehicles is authorised, the parking braking system of the tractor shall be capable of holding the vehicle combination, at the maximum permissible mass as specified by the tractor manufacturer, stationary on a 12 % up or down gradient.
In the case that this requirement cannot be met due to physical limitations (e.g. limited available tyre/road adhesion for the tractor to generate sufficient braking forces) this requirement is deemed to be fulfilled when the alternative requirement of point 3.1.3.4 in connection with point 2.2.1.20 of Annex I is complied with.
3.1.3.4.1.The requirement of point 3.1.3.4 is considered to be fulfilled when conditions 3.1.3.4.1.1 or 3.1.3.4.1.2 below are met:
3.1.3.4.1.1.
Even with the tractor engine not rotating, the combination at the maximum permissible mass remains stationary on the prescribed gradient when the activation of a single control device by the driver, from his driving seat, has applied the tractor parking braking system and the towed vehicle service braking system or only one of those two braking systems.
3.1.3.4.1.2.
The tractor parking braking system can hold stationary the tractor connected to an unbraked towed vehicle having a mass equal to the highest ‘combination mass PM+R’ mentioned in the test report.
‘PM+R’
=
combination mass (mass ‘PM’ + declared unbraked towed vehicle mass PR) according to point 3.1.1.2 and of the test report.
‘PM’
=
mass of the tractor (if applicable, including any ballast or supporting load or both of them).
3.1.3.5.A parking braking system which has to be actuated several times before attaining the prescribed performance is permissible.
3.1.4.Residual braking after transmission failure
3.1.4.1.In the case of category Tb tractors with a maximum design speed exceeding 60 km/h, the residual performance of the service braking system, in the event of failure in a part of its transmission, shall give a stopping distance not exceeding the following values and a mean fully developed deceleration not less than the following values, using a control force not exceeding 70 daN, when checked by the type-0 test with the engine disconnected from the following initial speeds for the relevant vehicle category:


That requirement shall not be construed as a departure from the requirements concerning secondary braking.
3.1.4.2.The residual braking effectiveness test shall be conducted by simulating the actual failure conditions in the service braking system.
3.2.Vehicles of the categories R and S
3.2.1.Service braking system
3.2.1.1.Requirement relating to tests of category R1 or S1 vehicles
If towed vehicles of category R1 or S1 are fitted with a service braking system, the performance of the system shall meet the requirements laid down for category R2 or S2 vehicles.
3.2.1.2.Requirement relating to tests of category R2 vehicles
If the service braking system is of the continuous or semi-continuous type, the sum of the forces exerted at the periphery of the braked wheels shall be at least X % of the maximum stationary wheel load.
X
=
50 for towed vehicle with a maximum design speed exceeding 30 km/h
X
=
35 for towed vehicle with a maximum design speed not exceeding 30 km/h
Where the towed vehicle is fitted with a compressed-air braking system, the pressure in the control line shall not exceed 650 kPa (and/or a corresponding digital demand value as defined in ISO 11992:2003 including ISO 11992-2:2003 and its Amd.1:2007 in the electric control line) and the pressure in the supply line shall not exceed 700 kPa during the brake test.
Where the towed vehicle is fitted with a hydraulic braking system, the pressure in the control line shall not exceed 11 500 kPa and the pressure in the supplementary line shall be between 1 500 kPa and 1 800 kPa during the brake test.
The test speed is 60 km/h or the maximum design speed of the towed vehicle, whichever is the lower.
Where the braking system is of the inertia type, it shall comply with the conditions laid down in Annex VIII.
3.2.1.3.Requirement relating to tests of category R3, R4 or S2 vehicles
The sum of the forces exerted at the periphery of the braked wheels shall be at least X % of the maximum stationary wheel load.
X
=
50 for towed vehicle of categories R3, R4 and S2 with a maximum design speed exceeding 30 km/h
X
=
35 for towed vehicles of categories R3a, R4a and S2a with a maximum design speed not exceeding 30 km/h
Where the towed vehicle is fitted with a compressed-air braking system, the pressure in the control line shall not exceed 650 kPa and the pressure in the supply line shall not exceed 700 kPa during the brake test.
The test speed is 60 km or the maximum design speed of the towed vehicle, whichever is the lower.
Where the towed vehicle is fitted with a hydraulic braking system, the pressure in the control line shall not exceed 11 500 kPa and the pressure in the supplementary line shall be between 1 500 kPa and 1 800 kPa during the brake test.
3.2.1.4.Within an axle group, wheel locking on one axle during the Type-0 test procedure is permitted. This requirement shall not be construed as a departure from the requirement of point 6.3.1. of Annex XI concerning wheel locking of directly controlled wheels.
3.2.2.Parking braking system
3.2.2.1.The parking braking system with which the towed vehicle is equipped shall be capable of holding the laden towed vehicle stationary, when separated from the tractor, on an 18 % up and down-gradient.
3.2.2.2.The requirements set out in 3.2.2.1 shall be fulfilled even during the cooling period. The cooling period is deemed to be terminated when the brakes have reached a temperature of 10 °C above ambient.
3.2.2.3.Hot and cold parking braking performance test
The test requirement as specified in point 3.1.3.3 apply correspondingly.
3.2.3.Automatic braking system
The automatic braking performance in the event of a failure, as described in points 2.2.1.17 and 2.2.1.18 of Annex I, when testing the laden vehicle from a speed of 40 km/h or 0,8 vmax (whichever is lower), shall not be less than 13,5 % of the maximum stationary wheel load. Wheel-locking at performance levels above 13,5 % is permitted.
3.3.Response time for vehicles of categories T, C, R and S
3.3.1.Where a vehicle is fitted with a service braking system which is totally or partially dependent on a source of energy other than the muscular effort of the driver, the following requirements shall be satisfied:
3.3.1.1.
In an emergency manoeuvre, the time elapsing between the moment when the control device begins to be actuated and the moment when the braking force on the least favourably placed axle reaches the level corresponding to the prescribed performance shall not exceed 0,6 seconds.
3.3.1.2.
In the case of vehicles fitted with compressed-air or towed vehicles with hydraulic braking systems or tractors with a hydraulic control line, the requirements of point 3.3.1 are considered to be satisfied if the vehicle complies with the provisions of Annex III.
3.3.1.3.
In the case of tractors fitted with hydraulic braking systems, the requirements of point 3.3.1 are considered to be satisfied if, in an emergency manoeuvre, the deceleration of the vehicle, or the pressure at the least favourable brake cylinder, reaches a level corresponding to the prescribed performance within 0,6 seconds.
3.3.1.4.
In case of tractors with one braked axle and an automatic engagement of the drive to all other axles during braking, the requirements of point 3.3.1 are considered to be satisfied if, the tractor satisfies both the prescribed stopping distance and the prescribed mean fully developed deceleration for the relevant vehicle category according to point 3.1.1.1, but in this case it is necessary to actually measure both parameters.
Appendix 1 Distribution of braking among the axles of vehicles and requirements for compatibility between tractor and towed vehicle
1. General requirements
1.1.Vehicles of categories T, C, R and S
1.1.1.Vehicles of categories Ta, Ca, R2a, R3a, R4a and S2a with a maximum design speed exceeding 30 km/h shall fulfil the following requirements of this Appendix:
1.1.1.1.
the compatibility requirements associated with diagrams 2 and 3, as appropriate, if a special device is used, this shall operate automatically. In the case of trailers with electronically controlled brake force distribution, the requirements of this appendix shall only apply when the trailer is electrically connected to the tractor by the ISO 7638:2003 connector.
1.1.1.2.
in the event of a failure of the control of the special device the braking performance specified in point 5 shall be fulfilled for the relevant vehicle.
1.1.1.3.
the marking requirements laid down in point 6.
1.1.2.Vehicles of categories Tb, R2b, R3b, R4b and S2b shall meet the relevant requirements of this Appendix. If a special device is used, this shall operate automatically.
1.1.3.However, vehicles of the categories mentioned in point 1.1.1 and those in point 1.1.2 equipped with an anti-lock braking system of category 1 or 2 (tractors) and category A or B (towed vehicles) fulfilling the relevant requirements of Annex XI shall also fulfil all the relevant requirements of this Appendix with the following exceptions:
1.1.3.1.
compliance with the adhesion utilisation requirements associated with diagram 1 is not required;
1.1.3.2.
in the case of tractors and towed vehicles, compliance with the unladen compatibility requirements associated with diagrams 2 and 3 as appropriate, is not required. However, for all load conditions, a braking rate shall be developed between a pressure of 20 kPa and 100 kPa (pneumatic braking systems) and 350 to 1 800 kPa (hydraulic braking systems) or the equivalent digital demand value at the coupling head of the control line(s);
1.1.3.3.
vehicles equipped with a special device which automatically controls the distribution of braking among the axles or automatically regulates the braking force according to the load on the axle(s) the requirements of points 5 and 6 shall apply.
1.1.4Where the vehicle is installed with an endurance braking system, the retarding force shall not be taken into consideration when determining the vehicle performance with respect to the provisions of this Appendix.
1.2.The requirements relating to the diagrams specified in points 3.1.6.1, 4.1 and 4.2, are valid for vehicles with a pneumatic and electrical control line according to point 2.1.4 of Annex I or a hydraulic control line according to point 2.1.5 of Annex I. In all cases, the reference value (abscissa of the diagrams) will be the value of the transmitted pressure or electrical signal respectively in the control line:
1.2.1.
For vehicles equipped according to point 2.1.4.1.1 of Annex I, this value will be the actual pneumatic pressure in the control line (pm);
1.2.2.
For vehicles equipped according to point 2.1.4.1.2 or 2.1.4.1.3 of Annex I, this value will be the pressure corresponding to the transmitted digital demand value in the electric control line, according to ISO 11992:2003 including ISO 11992-2:2003 and its Amd.1:2007.
Vehicles equipped according to point 2.1.4.1.2 of Annex I (with both pneumatic and electric control lines) shall satisfy the requirements of the diagrams related to both control lines. However, identical braking characteristic curves related to both control lines are not required.
1.2.3.
For vehicles equipped according to point 2.1.5.1 of Annex I, this value shall be the actual hydraulic pressure in the control line (pm).
1.3.Validation of the development of braking force.
1.3.1.At the time of type-approval it shall be checked that the development of braking on an axle of each independent axle group shall be within the following pressure ranges:
1.3.1.1.
Laden vehicles:
At least one axle shall commence to develop a braking force when the pressure at the coupling head is within the pressure range 20 to 100 kPa (pneumatic braking systems) and 350 to 1 800 kPa (hydraulic braking systems) respectively or equivalent digital demand value.
At least one axle of every other axle group shall commence to develop a braking force when the coupling head is at a pressure ≤ 120 kPa (pneumatic braking systems) and 2 100 kPa (hydraulic braking systems) respectively or equivalent digital demand value.
1.3.1.2.
Unladen vehicles:
At least one axle shall commence to develop a braking force when the pressure at the coupling head is within the pressure range 20 to 100 kPa (pneumatic braking systems) and 350 to 1 800 kPa (hydraulic braking systems) respectively or equivalent digital demand value.
1.3.1.3.
With the wheel(s) of the axle(s) raised off and free to rotate, apply an increasing brake demand and measure the coupling head pressure corresponding to when the wheel(s) can no longer be rotated by hand. In the case of tractors of category C an alternative procedure may be used for the validation of the development of braking force (e.g. by removing the tracks). This condition determines the development of the braking force.
2. Symbols
i
=
axle index (i = 1, front axle; i = 2, second axle; etc.)
E
=
wheelbase
ER
=
distance between coupling point and centre of axle of rigid drawbar towed vehicle and of centre-axle towed vehicle
fi
=
Ti/Ni, adhesion utilised by axle i
Fi
=
normal reaction of road surface on axle i under static conditions
FM
=
total normal static reaction of road surface on wheels of tractor
g
=
acceleration due to gravity: g = 9,81 m/s2
h
=
height above ground of centre of gravity specified by the manufacturer and agreed by the Technical Services conducting the approval test;
J
=
deceleration of vehicle
k
=
theoretical coefficient of adhesion between tyre and road
P
=
mass of vehicle
Ni
=
normal reaction of road surface on axle i under braking
pm
=
pressure at coupling head of control line
FR
=
total normal static reaction of road surface on all wheels of towed vehicle
FRmax
=
value of FR at maximum mass of towed vehicle
Ti
=
force exerted by the brakes on axle i under normal braking conditions on the road
TM
=
sum of braking forces at the periphery of all wheels of tractors
TR
=
sum of braking forces Ti at periphery of all wheels of towed vehicle
z
=
braking rate of vehicle = J/g
3. Requirements for tractors of category T
3.1.Two-axle tractors
3.1.1.For all categories of tractors for k values between 0,2 and 0,8:
z ≥ 0,10 + 0,85 (k – 0,20)
The provisions laid down in points 3.1.1 and 4.1.1 do not affect the requirements of Annex II relating to the braking performance. However, if, in tests made under the provisions of points 3.1.1. and 4.1.1., braking performances are obtained which are higher than those prescribed in Annex II, the provisions relating to the adhesion utilisation curves shall be applied within the areas of diagram 1 defined by the straight lines k = 0,8 and z = 0,8.
3.1.2.For all states of load of the vehicle, the adhesion utilisation curve of the rear axle shall not be situated above that for the front axle:
3.1.2.1.
for all braking rates between 0,15 and 0,30
This condition is also considered satisfied if, for braking rates between 0,15 and 0,30, the adhesion utilisation curves for each axle are situated between two lines parallel to the line of ideal adhesion utilisation given by the equation k = z + 0,08 as shown in diagram 1 of this Appendix and the adhesion utilisation curve for the rear axle for braking rates z > 0,3 complies with the relation:
z ≥ 0,3 + 0,74 (k – 0,38).
3.1.3.For tractors authorised to tow vehicles of category R3b, R4b and S2b fitted with compressed-air braking systems:
3.1.3.1.
When tested with the energy source stopped, the supply line blocked off, a reservoir of 0,5 litre capacity connected to the pneumatic control line and the system at cut-in and cut-out pressures, the pressure at full application of the braking control device shall be between 650 and 850 kPa at the coupling heads of the supply line and the pneumatic control line, irrespective of the load condition of the vehicle.
3.1.3.2.
For vehicles equipped with an electric control line, a full application of the control device of the service braking system shall provide a digital demand value corresponding to a pressure between 650 and 850 kPa (cf ISO 11992:2003 including ISO 11992-2:2003 and its Amd.1:2007).
3.1.3.3.
These values shall be demonstrably present in the tractor when the latter is uncoupled from the towed vehicle. The compatibility bands in the diagrams specified in points 3.1.6., 4.1. and 4.2., should not be extended beyond 750 kPa and/or the corresponding digital demand value (see ISO 11992:2003 including ISO 11992-2:2003 and its Amd.1:2007).
3.1.3.4.
It shall be ensured that at the coupling head of the supply line, a pressure of at least 700 kPa is available when the system is at cut-in pressure. This pressure shall be demonstrated without applying the service brakes.
3.1.4.For tractors authorised to tow vehicles of category R3b, R4b and S2b fitted with hydraulic braking systems:
3.1.4.1.
When tested with the energy source at idling speed and of 2/3 of maximum engine speed, a control line of the towed vehicle simulator (point 3.6 of Annex III) connected to the hydraulic control line. At full application of the braking control device the pressures shall be between 11 500 and 15 000 kPa at the hydraulic control and shall be between 1 500 and 3 500 kPa at the supplementary line, irrespective of the load condition of the vehicle.
3.1.4.2.
These values shall be demonstrably present in the tractor when uncoupled from the towed vehicle. The compatibility bands in the diagrams specified in points 3.1.6, 4.1 and 4.2, should not be extended beyond 13 300 kPa.
3.1.5.Verification of the requirements of points 3.1.1. and 3.1.2.
3.1.5.1.In order to verify the requirements of points 3.1.1 and 3.1.2, the manufacturer shall provide the adhesion utilisation curves for the front and rear axles calculated by the formulae:


The curves shall be plotted for both the following load conditions:
3.1.5.1.1.
Unladen, not exceeding the minimum mass declared by the manufacturer in the information document;
3.1.5.1.2.
Laden; where provision is made for several possibilities of load distribution, the one whereby the front axle is the most heavily laden shall be the one considered.
3.1.5.2.If it is not possible, for vehicles with permanent all-wheel drive or in the condition when the all-wheel drive is connected during braking, to carry out the mathematical verification pursuant to point 3.1.5.1, the manufacturer may instead verify by means of a wheel lock sequence test that, for all braking rates between 0,15 and 0,8, lockup of the front wheels occurs either simultaneously with or before the lockup of the rear wheels. This alternative option does not exempt the manufacturer to show compliance with point 3.1.5.1 for the condition when the all-wheel drive is not connected during braking.
3.1.5.2.1.However, for tractors which automatically apply the all-wheel drive when the braking is initiated above a vehicle speed of 20 km/h but not automatically connect the all-wheel drive when the service braking system is applied at speeds ≤ 20 km/h, then it is not required to show compliance with point 3.1.5.1 for the condition when the all-wheel drive is not connected during braking.
3.1.5.3.Procedure to verify the requirements of point 3.1.5.2.
3.1.5.3.1.The wheel lock sequence test shall be conducted on road surfaces with a coefficient of adhesion of not more than 0,3 and of about 0,8 (dry road) from the initial test speeds specified in point 3.1.5.3.2.
3.1.5.3.2.Test speeds:
0,8 vmax km/h, but not exceeding 60 km/h for decelerations on low coefficient of friction road surfaces;
0,9 vmax for decelerations on high coefficient of friction road surfaces.
3.1.5.3.3.The pedal force applied may exceed the permissible actuation forces pursuant to point 3.2.1.
3.1.5.3.4.Pedal force is applied and increased such that the second wheel on the vehicle shall reach lockup between 0,5 and 1 s after initiating the brake application, until lockup of both wheels on one axle occurs (additional wheels may also lock during the test, e.g. in the case of simultaneous lockup).
3.1.5.4.The tests prescribed in point 3.1.5.2 shall be carried out twice on each road surface. If the result of one test fails, a third, hence decisive test shall be carried out.
3.1.6.Tractors authorised to draw towed vehicles other than rigid drawbar towed vehicles and centre-axle towed vehicles
3.1.6.1.The permissible relationship between the braking rate TM/FM and the pressure pm shall lie within the areas shown on diagram 2 for all pressures between 20 and 750 kPa (in the case of compressed air braking system) and 350 and 13 300 kPa (in the case of hydraulic braking system)
3.2.Tractors with more than two axles
The requirements of point 3.1 shall apply to vehicles with more than two axles. The requirements of point 3.1.2 with respect to wheel lock sequence shall be considered to be met if, in the case of braking rates between 0,15 and 0,30, the adhesion utilised by at least one of the front axles is greater than that utilised by at least one of the rear axles.
4. Requirements for towed vehicles
4.1.For drawbar towed vehicles fitted with compressed-air and hydraulic braking systems:
4.1.1.
For drawbar towed vehicles with two axles the following requirements apply:
4.1.1.1.
For k values between 0,2 and 0,8:
z ≥ 0,1 + 0,85 (k – 0,2)
The provisions of point 3.1.1. do not affect the requirements of Annex II relating to the braking performance. However, if, in tests made under the provisions of point 3.1.1, braking performances are obtained which are higher than those prescribed in Annex II, the provisions relating to the adhesion utilisation curves shall be applied within the areas of diagrams 1 of this Annex defined by the straight lines k = 0,8 and z = 0,8.
4.1.1.2.
For all states of load of the vehicle, the adhesion utilisation curve of the rear axle shall not be situated above that for the front axle for all braking rates between 0,15 and 0,30. This condition is also considered satisfied if, for braking rates between 0,15 and 0,30, the following two conditions are satisfied:
4.1.1.2.1.
the adhesion utilisation curves for each axle are situated between two lines parallel to the line of ideal adhesion utilisation given by the equations k = z + 0,08 and k = z – 0,08 as shown in diagram 1
and
4.1.1.2.2.
the adhesion utilisation curve for the rear axle for braking rates z ≥ 0,3 complies with the relation z ≥ 0,3 + 0,74 (k – 0,38).
4.1.1.3.
For the verification of the requirements of points 4.1.1.1 and 4.1.1.2 the procedure should be as that in the provisions of point 3.1.5.
4.1.2.
For drawbar towed vehicles with more than two axles the requirements of point 4.1.1 shall apply. The requirements of point 4.1.1 with respect to wheel lock sequence shall be considered to be met if, in the case of braking rates between 0,15 and 0,30, the adhesion utilised by at least one of the front axles is greater than that utilised by at least one of the rear axles.
4.1.3.
The permissible relationship between the braking rate TR/FR and the pressure pm shall lie within the designated areas in diagram 3 for all pressures between 20 and 750 kPa (pneumatic) and 350 and 13 300 kPa (hydraulic) respectively, in both the laden and unladen states of load.
4.2.For rigid drawbar towed vehicles and centre-axle towed vehicles fitted with compressed-air and hydraulic braking systems:
4.2.1.
The permissible relationship between the braking rate TR/FR and the pressure pm shall lie within two areas derived from diagram 3, by multiplying the vertical scale by 0,95. This requirement shall be met at all pressures between 20 and 750 kPa (pneumatic) and 350 and 13 300 kPa (hydraulic) respectively, in both the laden and unladen states of load.
4.3.For drawbar towed vehicles with inertia braking system
4.3.1.The requirements according to point 4.1.1 apply also for drawbar towed vehicles with inertia braking system.
4.3.2.For drawbar towed vehicles with inertia braking system and with more than two axles the requirements according to point 4.1.2 of this Appendix apply.
4.3.3.For the calculation to verify the compliance with the provisions of point 4.1.1.3 the influence of the permissible drawbar force D* (point 10.3.1. of Annex VIII) can be ignored.
5. Requirements to be met in case of failure of the braking distribution system
When the requirements of this Appendix are fulfilled by means of a special device (e.g. controlled mechanically by the suspension of the vehicle), it shall be possible, in the event of the failure of its control, to stop the vehicle under the conditions specified for secondary braking in the case of tractors; tractors authorised to tow a vehicle fitted with compressed-air or hydraulic braking systems, it shall be possible to achieve a pressure at the coupling head of the control line within the range specified in points 3.1.3 and 3.1.4 In the event of failure of the control of the device on towed vehicles, a service braking performance of at least 30 % of that prescribed for the vehicle in question shall be attained.
6. Markings
6.1Vehicles which meet the requirements of this Appendix by means of a device mechanically controlled by the suspension of the vehicle shall be marked in accordance with the requirements laid down on the basis of Article 17(2)(k) and (5) of Regulation (EU) No 167/2013 and with the appropriate data to show the useful travel of the device between the positions corresponding to vehicle unladen and laden states, respectively, and any further information to enable the setting of the device to be checked.
6.1.1.When a brake load sensing device is controlled via the suspension of the vehicle by any other means, the vehicle shall be marked with information to enable the setting of the device to be checked.
6.2.When the requirements of this Appendix are met by means of a device which modulates the air or hydraulic pressure in the brake transmission, the vehicle shall be marked to show the axle loads at the ground, the nominal outlet pressures of the device and an inlet pressure of not less than 80 per cent of the maximum design inlet pressure, as declared by the vehicle manufacturer, for the following states of load:
6.2.1.
Technically permissible maximum axle load for the axle(s) which control(s) the device;
6.2.2.
Axle load(s) corresponding to the unladen mass of the vehicle in running order as stated in the test report for the braking requirements approval;
6.2.3.
The axle load(s) designated by the manufacturer to enable the setting of the device to be checked in service if this is (these are) different from the loads specified in points 6.2.1 to 6.2.2.
6.3.The markings referred to in points 6.1 and 6.2 shall be affixed in a visible position in indelible form. An example of the markings for a mechanically controlled device in a vehicle fitted with compressed-air or hydraulic braking system is provided in accordance with the requirements laid down on the basis of Article 34(3) of Regulation (EU) No 167/2013.
6.4.Electronically controlled brake force distribution systems that cannot fulfil the requirements of points 6.1, 6.2 and 6.3 shall have a self-checking procedure of the functions which influence brake force distribution. In addition, when the vehicle is stationary, it shall be possible to carry out the checks laid down in point 1.3.1, by generating the nominal demand pressure associated with the commencement of braking for both the laden and unladen conditions.
7. Vehicle testing
At the time of type-approval, the technical service shall verify conformity with the requirements contained within this Appendix and carry out any further tests considered necessary to this end. The report of any further tests shall be appended to the type-approval report.
Diagram 1 Tractors of category Tb and drawbar towed vehicles of categories R3b, R4b and S2b (see points 3.1.2.1 and 4.1.1.2)
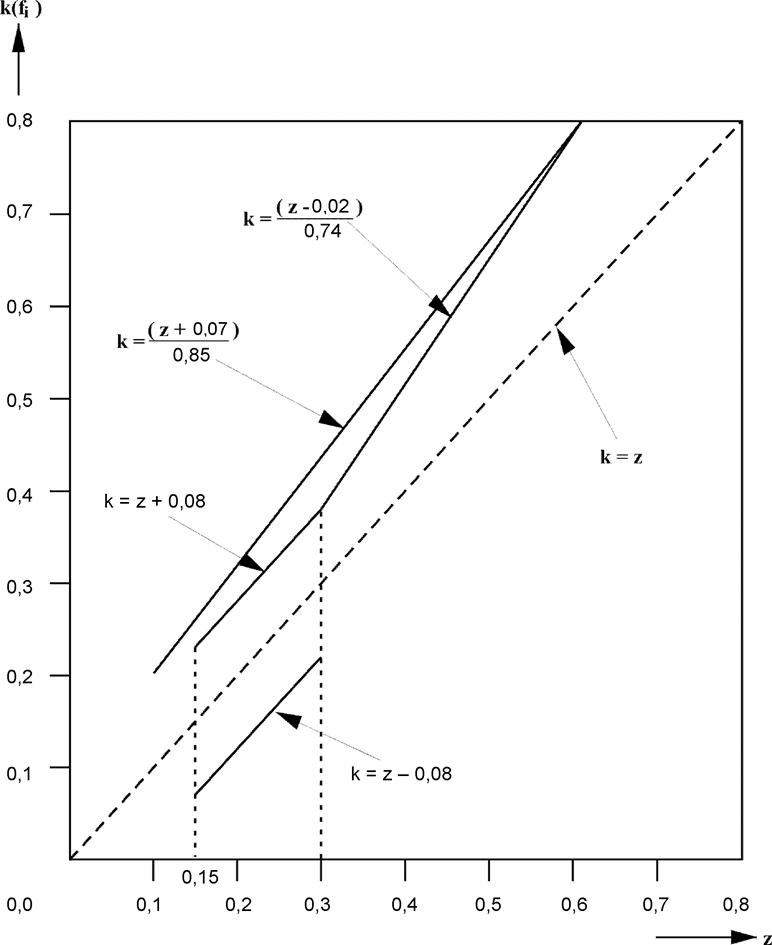
Note: The lower limit k = z – 0,08 is not applicable for the adhesion utilisation of the rear axle.
Diagram 2 Permissible relationship between braking rate TM/PM and the coupling head pressure pm for tractors of categories T and C with compressed air or hydraulic braking systems

Diagram 3 Permissible relationship between braking rate TR/FR and the coupling head pressure pm for towed vehicles of categories S2, R3 and R4 with compressed air or hydraulic braking systems
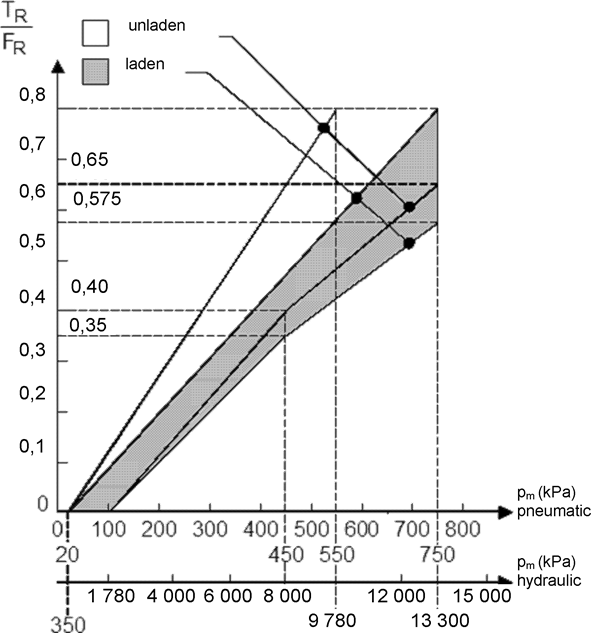
ANNEX III Requirements applying to the measurement of the response time
1. General Requirements
1.1.The response time for the service braking systems shall be determined with the vehicle stationary, the pressure being measured at the opening of the least favourably placed brake. For vehicles equipped with load sensing valves, these devices shall be set in the ‘laden’ position.
1.2.During the tests, the stroke of the brake cylinders of the individual axles shall be that corresponding to the most closely adjusted brakes.
1.3.Response times obtained in conformity with points 2.2, 2.3, 2.4, 2.6, 3.3, 3.4, 3.5, 3.6.5, 4.1, 4.5.1, 4.5.2, 4.5.3, 5.3.6, 6.2, shall be rounded to the nearest tenth of second. If the figure representing the hundredth units is 5 or more, the response time is rounded to the upper tenth.
1.4.The diagrams in Appendices 1 and 2 give examples of the correct configuration of the relevant simulators for setting and use.
2. Tractors equipped with compressed-air braking systems
2.1.At the beginning of each test, the pressure in the energy storage device shall be equal to the pressure at which the governor restores the feed to the system. In systems not equipped with a governor (e.g., pressure-limited compressors) the pressure in the energy storage device at the beginning of each test shall be 90 % of the pressure specified by the manufacturer and specified in point 1.2.2.1 of Part A of Annex IV, used for the tests prescribed in this annex.
2.2.The response times as a function of the actuating time (tf) shall be obtained by a succession of full actuations, beginning with the shortest possible actuating time and increasing to a time of about 0,4 seconds. The measured values shall be plotted on a graph.
2.3.The response time to be taken into consideration for the purpose of the test is that corresponding to an actuating time of 0,2 seconds. This response time can be obtained from the graph by interpolation.
2.4.For an actuating time of 0,2 seconds, the time elapsing from the initiation of the braking system control device actuation to the moment when the pressure in the brake cylinder reaches 75 % of its asymptotic value shall not exceed 0,6 seconds.
2.5.In the case of tractors having a pneumatic control line for towed vehicles, in addition to the requirements of point 1.1, the response time shall be measured at the extremity of a pipe 2,5 m long with an internal diameter of 13 mm which shall be joined to the coupling head of the control line of the service braking system. During this test, a volume of 385 ± 5 cm3 (which is deemed to be equivalent to the volume of a pipe 2,5 m long with an internal diameter of 13 mm and under a pressure of 650 kPa) shall be connected to the coupling head of the supply line. The length and internal diameter of the pipes shall be entered at item 2.4 of the test report.
2.6.The time elapsing from the initiation of brake-pedal actuation to the moment when:
2.6.1.
The pressure measured at the coupling head of the pneumatic control line;
2.6.2.
The digital demand value in the electric control line measured according to ISO 11992:2003, including ISO 11992-2:2003 and its Amd.1:2007, reaches x per cent of its asymptotic, respectively final, value shall not exceed the times shown in the table below:
| x [per cent] | t [s] |
|---|---|
| 10 75 | 0,2 0,4 |
2.7.In the case of tractors authorised to tow vehicles of category R3 or R4 fitted with compressed-air braking systems, in addition to the requirements in point 2.6., the prescriptions in point 2.2.1.17.2.1 of Annex I shall be verified by conducting the following test:
2.7.1.
by measuring the pressure at the extremity of a pipe 2,5 m long with an internal diameter of 13 mm which shall be joined to the coupling head of the supply line;
2.7.2.
by simulating a failure of the control line at the coupling head;
2.7.3.
by actuating the service braking control device in 0,2 seconds, as described in point 2.3.
3. Tractors equipped with hydraulic braking systems
3.1.The response time tests shall be carried out at an ambient temperature between 15 °C and 30 °C.
3.2.At the beginning of each test, the pressure in the energy storage device shall be equal to the pressure at which the governor restores the feed to the system. In systems not equipped with a governor (e.g., pressure-limited hydraulic pumps) the pressure in the energy storage device at the beginning of each test shall be 90 % of the pressure specified by the manufacturer and specified in point 1.2.1.2 of Part C of Annex IV, used for the tests prescribed in this annex.
3.3.The response times as a function of the actuating time (tf) shall be obtained by a succession of full actuations, beginning with the shortest possible actuating time and increasing to a time of about 0,4 seconds. The measured values shall be plotted on a graph.
In the case of a service braking system which is activated with no or only a limited assistance of energy a control force shall be applied which ensures at least the prescribed service braking performance.
3.4.The response time to be taken into consideration for the purpose of the test is that corresponding to an actuating time of 0,2 seconds. This response time can be obtained from the graph by interpolation.
3.5.For an actuating time of 0,2 seconds, the time elapsing from the initiation of the braking system control device actuation to the moment when the pressure in the brake cylinder reaches 75 % of its maximum values hall not exceed 0,6 seconds.
In the case of a full powered service braking system where the brake pressure in the brake actuator reaches a temporary maximum pressure which then falls to the mean stabilised pressure. This mean stabilised pressure should be taken for the calculation of the 75 % value.
3.6.Tractors equipped with a hydraulic control line for towed vehicles
3.6.1.In addition to the requirements of point 1.1, the response time shall be measured with a towed vehicle simulator (see point 1. of Appendix 2) which shall be joined to the coupling heads of the hydraulic control line and the supplementary line of the tractor.
3.6.2.The towed vehicle simulator shall have the following components and characteristics:
3.6.2.1.Supplementary line towed vehicle simulator
3.6.2.1.1.Supplementary line with a female coupling corresponding to ISO 16028:2006 having an orifice with a diameter of 0,6+ 0,2 mm in order to limit its flow during the test.
3.6.2.1.2.Piston accumulator (or equivalent device) complying with the following characteristics and test conditions:
3.6.2.1.2.1.
Nominal volume of 1 000 cm3;
3.6.2.1.2.2.
Initial precharge pressure of 1 000± 100 kPa at a displaced volume of 0 cm3;
3.6.2.1.2.3.
Maximum pressure of 1 500 kPa at a displaced volume of 500± 5 cm3.
3.6.2.1.3.The piston accumulator (or equivalent device) is connected with the supplementary line via a connection with an internal diameter of 12,5 mm consisting of a flexible pipe (according to EN853:2007) of 1,0 m length.
3.6.2.1.4.A testing port shall be provided as close as possible to the female ISO 16028:2006 coupling.
3.6.2.1.5.In order to be able to bleed the simulator before and after the test a bleeding device shall be provided.
3.6.2.2.Control line towed vehicle simulator
3.6.2.2.1.Control line with a female coupling corresponding to ISO 5676:1983
3.6.2.2.2.Energy storage device with piston (or equivalent device) complying with the following characteristics and test conditions:
3.6.2.2.2.1.
Initial precharge pressure of 500± 100 kPa at a displaced volume of 0 cm3
3.6.2.2.2.2.
Intermediate test pressure of 2 200± 200 kPa at a displaced volume of 100± 3 cm3
3.6.2.2.2.3.
Final pressure of 11 500± 200 kPa at a displaced volume of 140± 5 cm3
3.6.2.2.3.The energy storage device with piston (or equivalent device) is connected with the control line via a connection with an internal diameter of 10 mm consisting of a flexible pipe (according to EN853:2007) of 3,0 m and a rigid pipe of 4,5 m length
3.6.2.2.4.Testing ports shall be provided as close as possible to the energy storage device with piston (or equivalent device) and to the female ISO 5676:1983 coupling.
3.6.2.2.5.In order to be able to bleed air from the connection pipes before the test a bleeding device shall be provided
3.6.3.The test shall be performed under the following conditions:
3.6.3.1.
the connection pipes shall be bleeded from air before the test;
3.6.3.2.
the engine speed of the tractor shall be at 25 % above idling speed;
3.6.3.3.
the bleeding device of the supplementary line towed vehicle simulator shall be fully opened.
3.6.4.With regard to the measuring of the response time according to points 3.3 and 3.4, the brake control force shall be such to obtain at least a pressure of 11 500 kPa on the coupling head of the control line with the engine running at 25 % above idling speed.
3.6.5.For an actuating time of 0,2 seconds, the time elapsing from the initiation of the braking system control device to the moment when the pressure measured at the testing port close to energy storage device with piston (or equivalent device) reaches 75 % of its maximum value according to point 3.5 shall not exceed 0,6 seconds.
However, the maximum value relates here to the pressure measured at the testing port instead of the brake pressure as in the case of point 3.5.
4. Towed vehicles equipped with compressed-air braking systems
4.1.The towed vehicle's response times shall be measured without the tractor. To replace the tractor, it is necessary to provide a simulator to which the coupling heads of the supply line, the pneumatic control line and/or the connector of the electric control line are connected.
4.2.The pressure in the supply line shall be 650 kPa.
4.3.The simulator for pneumatic control lines shall have the following characteristics:
4.3.1.
It shall have a reservoir with a capacity of 30 litres which shall be charged to a pressure of 650 kPa before each test and which shall not be recharged during each test. At the outlet of the braking control device, the simulator shall incorporate an orifice with a diameter of from 4,0 to 4,3 mm inclusive. The volume of the pipe measured from the orifice up to and including the coupling head shall be 385 ± 5 cm3 (which is deemed to be equivalent to the volume of a pipe 2,5 m long with an internal diameter of 13 mm and under a pressure of 650 kPa). The control line pressures referred to in point 4.3.3 shall be measured immediately downstream of the orifice.
4.3.2.
The control device shall be so designed that its performance in use is not affected by the tester.
4.3.3.
The simulator shall be set, e.g. through the choice of orifice in accordance with point 4.3.1 in such a way that, if a reservoir of 385 ± 5 cm3 is joined to it, the time taken for the pressure to increase from 65 to 490 kPa (10 and 75 per cent respectively of the nominal pressure of 650 kPa) shall be 0,2 ± 0,01 seconds. If a reservoir of 1 155 ± 15 cm3 is substituted for the above-mentioned reservoir, the time taken for the pressure to increase from 65 to 490 kPa without further adjustment shall be 0,38 ± 0,02 seconds. Between these two pressure values, the pressure shall increase in an approximately linear way. These reservoirs shall be connected to the coupling head without using flexible pipes and the connection shall have an internal diameter of not less than 10 mm.
4.3.4.
The diagrams in the Appendix 1 give an example of the correct configuration of the simulator for setting and use.
4.4.The simulator for checking the response to signals transmitted via the electric control line shall have the following characteristics:
4.4.1.
The simulator shall produce a digital demand signal in the electric control line according to ISO 11992-2:2003 and its Amd.1:2007 and shall provide the appropriate information to the towed vehicle via pins 6 and 7 of the ISO 7638:2003 connector. For the purpose of response time measurement, the simulator may at the manufacturer's request transmit to the towed vehicle information that no pneumatic control line is present and that the electric control line demand signal is generated from two independent circuits (see paragraphs 6.4.2.2.24 and 6.4.2.2.25 of ISO 11992-2:2003 and its Amd.1:2007).
4.4.2.
The braking system control shall be so designed that its performance in use is not affected by the tester.
4.4.3.
For the purpose of response time measurement the signal produced by the electric simulator shall be equivalent to a linear pneumatic pressure increase from 0,0 to 650 kPa in 0,2 ± 0,01 seconds.
4.5.Performance requirements
4.5.1.For towed vehicles with a pneumatic control line the time elapsing between the moment when the pressure produced in the control line by the simulator reaches 65 kPa and the moment when the pressure in the brake actuator of the towed vehicle reaches 75 per cent of its asymptotic value shall not exceed 0,4 seconds.
4.5.1.1.Towed vehicles equipped with a pneumatic control line and having electric control transmission shall be checked with the electrical power supplied to the towed vehicle via the ISO 7638:2003 connector (5 or 7 pin).
4.5.2.For towed vehicles with an electric control line the time elapsing between the moment when the signal produced by the simulator exceeds the equivalent of 65 kPa and the moment when the pressure in the brake actuator of the towed vehicle reaches 75 % of its asymptotic value shall not exceed 0,4 seconds.
4.5.3.In the case of towed vehicles equipped with a pneumatic and an electric control line, the response time measurement for each control line shall be determined independently according to the relevant procedure described in points 4.5.1.1 and 4.5.2.
5. Towed vehicles equipped with hydraulic braking systems
5.1.The tests shall be carried out at an ambient temperature between 15 °C and 30 °C.
5.2.The response times of the towed vehicle shall be measured without a tractor. In order to simulate the tractor, it is necessary to provide a tractor simulator to which the coupling heads of the control line and the supplementary line are connected. If the towed vehicle is equipped with an electrical connector as specified in point 2.1.5.1.3 of Annex I, this connector shall also be connected to the tractor simulator (see point 2. of Appendix 2).
5.3.The tractor simulator shall have the following characteristics:
5.3.1.
The tractor simulator shall be fitted with the types of connections as specified in points 2.1.5.1.1 to 2.1.5.1.3 of Annex I with regard to the tractor.
5.3.2.
When the tractor simulator is activated (e. g. by an electrical switch):
5.3.2.1.
a pressure of 11 500+ 500 kPa shall be generated on the coupling head of the control line,
5.3.2.2.
a pressure of 1 500+ 300 kPa shall be present on the coupling head of the supplementary line.
5.3.3.
When the control line of the towed vehicle is not connected, the tractor simulator shall be capable of generating a pressure of 11 500 kPa at the coupling head of the control line within 0,2 seconds after it was activated (e.g. by an electrical switch).
5.3.4.
The hydraulic fluid used in the tractor simulator shall have a viscosity of 60± 3 mm2/s at a temperature of 40± 3 °C (e.g. hydraulic fluid according to SAE 10W30). During the tractor simulator test the temperature of the hydraulic fluid shall not exceed 45 °C.
5.3.5.
If the towed vehicle is equipped with hydraulic energy storage devices to comply with the requirements for the service braking system, the energy storage devices shall be charged prior to the response time measurements to a pressure as mentioned by the manufacturer in the test report to achieve the minimum prescribed service braking performance.
5.3.6.
When the tractor simulator is connected to the control line of the towed vehicle simulator (as specified in point 3.6.2) the tractor simulator shall be calibrated in such a way that the time elapsing from the activation of the tractor simulator and the moment when the pressure in the energy storage device with piston (or equivalent device) of the control line of the towed vehicle simulator reaches 11 500 kPa shall be 0,6+ 0,1 seconds. To achieve this performance the flow of the tractor simulator shall be adjusted (e.g. by a flow regulator). The connection pipes of the control line of the towed vehicle simulator shall be bleeded from air before this calibration.
5.3.7.
The control device of the tractor simulator shall be so designed that its performance is not effected by the tester.
5.4.Performance requirements
5.4.1.When the calibrated tractor simulator (see point 5.3.6) is connected with the towed vehicle, the time elapsing between the moment when the tractor simulator is activated (e.g. by an electrical switch) and the moment when the pressure in the least favourable brake actuator reaches 75 % of its maximum value shall not exceed 0,6 seconds.
In the case of a service braking system, where the brake pressure in the brake actuator reaches a temporary maximum pressure which then falls to the mean stabilised pressure, the mean stabilised pressure should be taken for the calculation of the 75 % value.
6. Tractors equipped with service braking system using spring brakes
6.1.The response time measurement has to be carried out with the spring brakes adjusted as closely as possible. The initial pressure in the spring compression chamber, corresponding to this testing requirement, shall be specified by the manufacturer.
6.2.The time elapsing from the actuation of the service brake control device (brakes fully released) to the moment when the pressure in the spring compression chamber of the least favourable brake cylinder reaches a pressure corresponding to 75 % of the prescribed braking performance shall not exceed 0,6 seconds.
Appendix 1 Examples of pneumatic simulators
1.Setting the Simulator

2.Testing the Trailer

A
=
supply connection with shut-off valve
C1
=
pressure switch in the simulator, set at 65 kPa and at 490 kPa
C2
=
pressure switch to be connected to the brake actuator of the towed vehicle, to operate at 75 per cent of the asymptotic pressure in the brake actuator CF
CF
=
brake cylinder
L
=
line from orifice O up to and including its coupling head TC, having an inner volume of 385 ± 5 cm3 under a pressure of 650 kPa
M
=
pressure gauge
O
=
orifice with a diameter of not less than 4 mm and not more than 4,3 mm
PP
=
pressure test connection
R1
=
30 litre air reservoir with drain valve
R2
=
calibrating reservoir, including its coupling head TC, to be 385 ± 5 cm3
R3
=
calibrating reservoir, including its coupling head TC, to be 1 155 ± 15 cm3
RA
=
shut-off valve
TA
=
coupling head, supply line
V
=
braking system control device
TC
=
coupling head, control line
VRU
=
emergency relay valve
3.Example of a simulator for electric control lines

ECL
=
Electric Control Line corresponding to ISO 7638:2003
SIMU
=
Simulator of Byte 3,4 of EBS 11 according to ISO 11992:2003 with output signals at start, 65 kPa and 650 kPa
A
=
Supply connection with shut-off valve
C2
=
Pressure switch to be connected to the brake actuator of the towed vehicle, to operate at 75 per cent of the asymptotic pressure in the brake actuator CF
CF
=
Brake cylinder
M
=
Pressure gauge
PP
=
Pressure test connection
TA
=
Coupling head, supply line
VRU
=
Emergency relay valve
Appendix 2 Examples of hydraulic simulators
1.Towed vehicle simulator
1.1.Supplementary line towed vehicle simulator

TA
=
coupling head, supplementary line (female coupling ISO 16028:2006)
M
=
pressure test port
PT
=
pressure transducer
P1
=
flexible pipe acc. to EN853:2007 with internal diameter 12,5 mm
A
=
hydraulic accumulator (volume: 1 000 cm3, pre-charge pressure: 1 000 kPa)
B
=
bleeding screw
V
=
bleeding device
O
=
orifice
P2
=
flexible pipe with internal diameter 10 mm
T
=
return to tractor tank
1.2.Control line towed vehicle simulator

TA
=
coupling head, control line (female coupling ISO 5676:1983)
M
=
port for pressure gauge or pressure transducer
FP
=
flexible pipe acc. to EN853:2007 with internal diameter 10 mm
RP
=
rigid pipe with internal diameter 10 mm
PT
=
pressure transducer
B
=
bleeding screw
C
=
cylinder/s (*)

2.Tractor simulator

F
=
filters
PM
=
pump
PT
=
pressure transducers
CLRV
=
control line relief valve
SLRV
=
supplementary line relief valve
SV
=
3 way solenoid valve
FR
=
flow regulator
MV
=
proportional modulation valve
TA
=
coupling head, supplementary line (male coupling ISO 16028:2006)
TC
=
coupling head, control line (male coupling ISO 5676:1983)
EC
=
electrical connection (female ISO 7638:2003)
ANNEX IV Requirements applying to energy sources and energy storage devices of braking systems and trailer braking couplings and to vehicles fitted with them
1. Definitions
For the purposes of this Annex:
1.1.
‘hydraulic or pneumatic braking system with stored energy’ means a braking system where energy is supplied by a hydraulic fluid or air under pressure, stored in one or more energy storage devices fed from one or more pressure pumps or compressor(s) each fitted with a means of limiting the pressure to a maximum value (specified by the manufacturer).
A.COMPRESSED-AIR BRAKING SYSTEMS
1. Capacity of energy storage devices (Energy reservoirs)
1.1.General requirements
1.1.1.Vehicles on which the operation of the braking system depends on the use of compressed air shall be fitted with reservoirs of a capacity meeting the requirements laid down in points 1.2 and 1.3.
1.1.2.However, the reservoirs shall not be required to be of a prescribed capacity if the braking system is such that in the absence of any energy reserve it is possible with the service braking system control device to achieve a braking performance at least equal to that prescribed for the secondary braking system.
1.1.3.When verifying compliance with the requirements laid down in points 1.2 and 1.3 the brakes shall be adjusted as closely as possible.
1.2.Vehicles of category T
1.2.1.The air brake reservoirs of vehicles shall be so designed that after eight full-stroke actuations of the service braking system control device, the pressure remaining in the air brake reservoir shall be not less than the pressure required to obtain the specified secondary braking performance.
1.2.2.During the test, the following requirements shall be satisfied:
1.2.2.1.
The initial pressure in the reservoirs shall be that indicated by the manufacturer. This pressure shall be such as to enable the prescribed performance for the service braking system to be achieved. The initial pressure shall be stated in the information document.
1.2.2.2.
The reservoir or reservoirs shall not be replenished; in addition, the reservoir or reservoirs of auxiliary equipment shall be isolated.
1.2.2.3.
In the case of vehicles authorised to tow a vehicle, the supply line shall be blocked off and a reservoir of 0,5 litre capacity shall be connected to the control line. The pressure in this reservoir shall be exhausted before each actuation of the brakes. After the test referred to in point 1.2.1 the pressure in the control line shall not be less than one half of the pressure obtained at the first brake application.
1.3.Vehicles of categories R and S
1.3.1.Reservoirs fitted to towed vehicles shall be such that after eight full-stroke actuations of the tractor's service braking system, the pressure supplied to the operating parts using it does not fall below a level equivalent to one-half of the figure obtained at the first brake application and without actuating either the automatic or the parking braking system of the towed vehicle.
1.3.2.During the test, the following requirements shall be satisfied:
1.3.2.1.
The pressure in the reservoirs at the beginning of the test shall be 850 kPa.
1.3.2.2.
The supply line shall be blocked off; in addition, the auxiliary equipment reservoirs shall be isolated.
1.3.2.3.
The reservoir shall not be replenished during the test.
1.3.2.4.
At each brake application, the pressure in the control line shall be 750 kPa.
1.3.2.5.
At each brake application, the digital demand value in the electric control line shall be corresponding to a pneumatic pressure of 750 kPa.
2. Capacity of energy sources
2.1.General provisions
Compressors shall satisfy the requirements laid down in the following points:
2.2.Symbols specific to this section
2.2.1.
p1 the pressure corresponding to 65 % of the pressure p2 referred to in point 2.2.2.
2.2.2.
p2 is the value specified by the manufacturer and referred to in point 1.2.2.1.
2.2.3.
t1 is the time required for the relative pressure to rise from 0 to p1; t2 is the time required for the relative pressure to rise from 0 to p2.
2.3.Conditions of measurement
2.3.1.In all cases the speed of the compressor shall be that obtained when the engine is running at the speed corresponding to its maximum power or at the speed allowed by the governor.
2.3.2.The auxiliary equipment reservoirs shall be isolated during the tests for determining the periods t1 and t2.
2.3.3.On vehicles constructed to tow vehicles, the towed vehicle shall be represented by an air reservoir whose maximum relative pressure p (expressed in kPa/100) is that which can be supplied through the feed circuit of the tractor and whose volume V (expressed in litres) is given by the formula p × V = 20 R (R being the permissible maximum mass, expressed in tons, on the axles of the towed vehicle).
2.4.Interpretation of results
2.4.1.The time t1 recorded for the least favoured energy storage device shall not exceed:
2.4.1.1.
three minutes in the case of vehicles to which the coupling of a towed vehicle is not authorised;
2.4.1.2.
six minutes in the case of vehicles to which the coupling of a towed vehicle is authorised.
2.4.2.The time t2 for the least efficient reservoir shall not exceed:
2.4.2.1.
six minutes in the case of vehicles to which the coupling of a towed vehicle is not authorised;
2.4.2.2.
nine minutes in the case of vehicles to which the coupling of a towed vehicle is authorised.
2.5.Additional test
2.5.1.When the vehicle is equipped with an auxiliary equipment reservoir or reservoirs with a total capacity exceeding 20 % of the total capacity of the brake reservoirs, an additional test shall be carried out during the course of which there shall be no interference with the functioning of the valves controlling the filling of the auxiliary equipment reservoir(s). A check shall be made during the course of this test that the period t3 required to bring about a rise in the pressure in the brake reservoirs from 0 to p2 is less than:
2.5.1.1.
eight minutes in the case of vehicles to which the coupling of a towed vehicle is not authorised
2.5.1.2.
eleven minutes in the case of vehicles to which the coupling of a towed vehicle is authorised.
2.5.2.The test shall be performed in the conditions prescribed in points 2.3.1 and 2.3.3.
2.6.Tractors
2.6.1.Vehicles to which the coupling of a towed vehicle is authorised shall also comply with the above requirements for vehicles not so authorised. In that case, the tests in points 2.4.1, 2.4.2 and 2.5.1 shall be conducted without the reservoir mentioned in item 2.3.3.
3. Pressure test connections
3.1.A pressure test connection shall be fitted at the closest readily accessible position to the least efficient reservoir within the meaning of point 2.4.
3.2.The pressure test connections shall comply with clause 4 of ISO standard 3583-1984.
B.VACUUM BRAKING SYSTEMS
1. Capacity of energy storage devices (energy reservoirs)
1.1.General
1.1.1.Vehicles on which the operation of the braking system requires the use of a vacuum shall be equipped with reservoirs of a capacity meeting the requirements laid down in points 1.2 and 1.3.
1.1.2.However, the reservoirs shall not be required to be of a prescribed capacity if the braking system is such that in the absence of any energy reserve it is possible to achieve a braking performance at least equal to that prescribed for the secondary braking system.
1.1.3.In verifying compliance with the requirements laid down in points 1.2 and 1.3, the brakes shall be adjusted as closely as possible.
1.2.Vehicles of category T and C
1.2.1.The reservoirs of agricultural vehicles shall be such that it is still possible to achieve the performance prescribed for the secondary braking system:
1.2.1.1.
after eight full-stroke actuations of the service braking system control device where the energy source is a vacuum pump; and
1.2.1.2.
after four full-stroke actuations of the service braking system control device where the energy source is the engine.
1.2.2.Testing shall be performed in conformity with the following requirements:
1.2.2.1.
The initial energy level in the reservoir(s) shall be that specified by the manufacturer. It shall be such as to enable the prescribed service-braking performance to be achieved and shall correspond to a vacuum not exceeding 90 % of the maximum vacuum furnished by the energy source. The initial energy level shall be stated in the information document.
1.2.2.2.
The reservoir(s) shall not be fed; in addition, any reservoir(s) for auxiliary equipment shall be isolated.
1.2.2.3.
In the case of agricultural vehicles authorised to tow a towed vehicle, the supply line shall be blocked off and a reservoir of 0,5 litre capacity shall be connected to the control line. After the test referred to in point 1.2.1, the vacuum level provided at the control line shall not have fallen below a level equivalent to one-half of the figure obtained at the first brake application.
1.3.Vehicles of categories R1, R2 and S1
1.3.1.The reservoir(s) with which towed vehicles are equipped shall be such that the vacuum level provided at the user points shall not have fallen below a level equivalent to one-half of the value obtained at the first brake application after a test comprising four full-stroke actuations of the towed vehicle's service braking system.
1.3.2.Testing shall be performed in conformity with the following requirements:
1.3.2.1.
The initial energy level in the reservoir(s) shall be that specified by the manufacturer. It shall be such as to enable the prescribed service braking performance to be achieved. The initial energy level shall be stated in the information document.
1.3.2.2.
The reservoir(s) shall not be fed; in addition, any reservoir(s) for auxiliary equipment shall be isolated.
2. Capacity of energy sources
2.1.General
2.1.1.Starting from the ambient atmospheric pressure, the energy source shall be capable of achieving in the reservoir(s) in three minutes the initial level specified in point 1.2.2.1. In the case of a vehicle to which the coupling of a towed vehicle is authorised, the time taken to achieve that level in the conditions specified in point 2.2 shall not exceed six minutes.
2.2.Conditions of measurement
2.2.1.The speed of the vacuum source shall be:
2.2.1.1.
Where the vacuum source is the vehicle engine, the engine speed obtained with the vehicle stationary, the neutral gear engaged and the engine idling;
2.2.1.2.
where the vacuum source is a pump, the speed obtained with the engine running at 65 % of the speed corresponding to its maximum power output; and
2.2.1.3.
where the vacuum source is a pump and the engine is equipped with a governor, the speed obtained with the engine running at 65 % of the maximum speed allowed by the governor.
2.2.2.Where it is intended to couple to the vehicle a towed vehicle whose service braking system is vacuum-operated, the towed vehicle shall be represented by an energy storage device having a capacity V in litres determined by the formula:
V = 15 R
where R is the maximum permissible mass, in metric tonnes, on the axles of the towed vehicle.
C.HYDRAULIC BRAKING SYSTEMS WITH STORED ENERGY
1. Capacity of energy storage devices
1.1.General
1.1.1.Vehicles on which the operation of the braking system requires the use of stored energy provided by hydraulic fluid under pressure shall be equipped with energy storage devices of a capacity meeting the requirements laid down in points 1.2 and 1.3.
1.1.2.However, the energy storage devices shall not be required to be of a prescribed capacity if the braking system is such that in the absence of any energy reserve it is possible with the service braking system control device to achieve a braking performance at least equal to that prescribed for the secondary braking system.
1.1.3.In verifying compliance with the requirements laid down in points 1.2.1, 1.2.2 and 2.1, the brakes shall be adjusted as closely as possible.
1.2.Vehicles of category T and C
1.2.1.Vehicles equipped with a hydraulic braking system with stored energy shall meet the following requirements:
1.2.1.1.
After eight full-stroke actuations of the service braking system control device, it shall still be possible to achieve, on the ninth application, the performance prescribed for the secondary braking system.
1.2.1.2.
Testing shall be performed in conformity with the following requirements:
1.2.1.2.1.
Testing shall commence at a pressure that may be specified by the manufacturer but is not higher than the cut-in pressure.
1.2.1.2.2.
The energy storage devices shall not be fed; in addition, any energy storage devices for auxiliary equipment shall be isolated.
1.2.2.Tractors equipped with a hydraulic braking system with stored energy which cannot meet the requirements of point 2.2.1.4.1 of Annex I shall be deemed to satisfy that point if the following requirements are met:
1.2.2.1.
After any single transmission failure it shall still be possible after eight full-stroke actuations of the service braking system control device, to achieve, at the ninth application, at least the performance prescribed for the secondary braking system or, or, where performance prescribed for the secondary braking system requiring the use of stored energy is achieved by a separate control device, it shall still be possible after eight full-stroke actuations to achieve, at the ninth application, the residual performance prescribed in paragraph 3.1.4 of Annex II of this Regulation.
1.2.2.2.
Testing shall be performed in conformity with the following requirements:
1.2.2.2.1.
With the energy source stationary or operating at a speed corresponding to the engine idling speed, any transmission failure may be induced. Before inducing such a failure the energy storage device(s) shall be at a pressure that may be specified by the manufacturer but not exceeding the cut-in pressure.
1.2.2.2.2.
The auxiliary equipment and its energy storage devices, if any, shall be isolated.
1.3.Vehicles of categories R and S
1.3.1.If towed vehicles are equipped with energy storage devices (energy reservoirs), they shall be such that, after eight full-stroke actuations of the tractor's service braking system, the energy level supplied to the operating members using the energy, does not fall below a level equivalent to one-half of the figure obtained at the first brake application and without actuating either the automatic or the parking braking system of the towed vehicle.
1.3.2.During the test, the following requirements shall be satisfied:
1.3.2.1.
The pressure in the energy storages at the beginning of the test shall be 15 000 kPa;
1.3.2.2.
The supplementary line shall be stopped; in addition, any energy storage device(s) for auxiliary equipment shall be isolated;
1.3.2.3.
The energy storage device(s) shall not be replenished during the test.
1.3.2.4.
At each brake application, the pressure in the hydraulic control line shall be 13 300 kPa.
2. Capacity of hydraulic fluid energy sources
The energy sources shall meet the requirements set out in the following points:
2.1.Vehicles of category T and C
2.1.1Symbols
2.1.1.1.
‘p1’ represents the maximum system operational pressure (cut-out pressure) in the energy storage devices specified by the manufacturer.
2.1.1.2.
‘p2’ represents the pressure after four full-stroke actuations with the service braking system control device, starting at p1, without having fed the energy storage devices.
2.1.1.3.
‘t’ represents the time required for the pressure to rise from p2 to p1 in the energy storage devices without application of the service braking system control device.
2.1.2.Conditions of measurement
2.1.2.1.During the test to determine the time t, the feed rate of the energy source shall be that obtained when the engine is running at the speed corresponding to its maximum power or at the speed allowed by the governor.
2.1.2.2.During the test to determine the time t, energy storage devices for auxiliary equipment shall not be isolated other than automatically.
2.1.3.Interpretation of results
The time t shall not exceed 30 s in the case of tractors.
2.2.Tractors equipped with a hydraulic control line for towed vehicles
2.2.1.To determine the feed rate of the energy source the supplementary line towed vehicle simulator as prescribed in paragraph 3.6.2.1 of Annex III to this Regulation shall be connected to the coupling head of the hydraulic supplementary line of the tractor.
2.2.2.The test shall be performed under the following conditions:
2.2.2.1.
The test shall be carried out at an ambient temperature between 15 °C and 30 °C.
2.2.2.2.
The supplementary line towed vehicle simulator shall be connected to the coupling head of the supplementary line before the test with engine not running.
2.2.2.3.
The engine speed of the tractor during the test shall be 25 % above idling speed.
2.2.2.4.
The parking brake control of the tractor shall be fully released during the test.
2.2.3.With the engine running and the bleeding device fully closed, the time elapsing when the pressure at the testing port close to the female ISO 16028:2006 coupling rises from 300 kPa to 1 500 kPa shall not exceed 2,5 seconds.
2.3.Vehicles of category R and S
If a towed vehicle using an energy storage device to assist the service braking system and such an energy storage device is recharged by the control line pressure during application of the service braking and/or by an energy source fitted on the towed vehicle, the following requirements shall be met:
2.3.1.The energy source shall be powered by the tractor simulator according to Appendix 2 of Annex III via the electrical connector conforming to ISO 7638:2003.
2.3.2.Symbols
2.3.2.1.
‘pR1’ represents the maximum system operational pressure (cut-out pressure) in the energy storage device specified by the manufacturer.
2.3.2.2.
‘pR2’ represents the pressure after four full-stroke actuations of the tractor's service braking system control device.
2.3.2.3.
‘tR’ represents the time required for the pressure to rise from pR2 to pR1 in the energy storage device without application of the service braking system control device of the tractor.
2.3.3.Conditions of measurement
During the test to determine the time tR the following requirements shall be satisfied:
2.3.3.1.
The pressure in the energy storage device at the beginning of the test shall be the pressure ‘pR1’.
2.3.3.2.
The service braking system shall be operated four times by the control line of the tractor simulator.
2.3.3.3.
At each brake application, the pressure in the control line shall be 13 300 kPa.
2.3.3.4.
Energy storage devices for auxiliary equipment shall not be isolated other than automatically.
2.3.3.5.
The valve feeding the energy storage device by the pressure of the control line shall be closed during the test.
2.3.4.Interpretation of results
The time tR shall not exceed 4 min.
3. Characteristics of alarm devices
With the engine stationary and commencing at a pressure that may be specified by the manufacturer but does not exceed the cut-in pressure, the alarm device shall not operate following two full-stroke actuations of the service braking system control device.
ANNEX V Requirements applying to spring brakes and to vehicles fitted with them
1. Construction, fitting and inspection requirements
1.1.Definitions
For the purposes of this Annex:
1.1.1.
‘spring braking systems’ means braking systems for which the energy required for braking is supplied by one or more springs acting as an energy storage device;
1.1.2.
‘pressure’ means negative pressure if the compression of the springs is obtained by means of a vacuum device.
2. General requirements
For the purposes of this Annex, the maximum design speed is meant to be in the forward direction of the vehicle travel, unless otherwise explicitly mentioned.
2.1.A spring braking system shall not be used as a service braking system except under the condition specified in point 2.2. However, in the event of a failure in a part of the transmission of the service braking system, a spring braking system may be used to achieve the residual performance prescribed in point 3.1.4 of Annex II provided that the driver can graduate this action.
2.1.1.Spring brakes may be used as secondary braking system independently of the vehicle maximum design speed, provided that the driver can graduate their braking action and that the performance requirements of Annex II are fulfilled.
Exceptionally, in the case of vehicles with maximum design speed not exceeding 30 km/h that use spring brakes, which control is of the ON/OFF type (e.g. a knob or a switch) and do not allow the driver to graduate the braking action, as secondary braking system, the following requirements shall be met:
2.1.1.1.
The driver shall be able to actuate the spring brakes control from own driving seat, while keeping at least one hand on the steering control.
2.1.1.2.
The braking performance prescribed in Annex II to this Regulation shall be fulfilled.
2.1.1.3.
The prescribed performance shall be obtained without deviation of the vehicle from its course, without abnormal vibrations and without wheel-locking.
2.1.2.Vacuum spring brakes shall not be used for towed vehicles.
The energy necessary to compress the spring in order to release the brake shall be supplied and controlled by the control device actuated by the driver
2.2.On vehicles with a maximum design speed not exceeding 30 km/h, a spring braking system may be used as a service braking system, provided that the driver can graduate its braking action.
In the case of a spring braking system used as a service braking system, the following additional requirements shall be fulfilled:
2.2.1.
response time requirements as laid down in point 5 of Annex III;
2.2.2.
with the spring brakes adjusted as closely as possible, it shall be possible to actuate:
2.2.2.1.
the brake 10 times within a minute with the engine running at idle speed (brake applications distributed evenly within this period);
2.2.2.2.
the service braking system 6 times starting with a pressure not higher than the cut-in pressure of the energy source. During this test the energy storage devices shall not be fed. In addition, any energy storage for auxiliary equipment shall be isolated.
2.2.3.
The spring brakes shall be designed in such a way that they are not subject to failure under fatigue. Thus, the manufacturer shall provide the Technical Service with appropriate endurance test reports.
2.3.A small variation in any of the pressure limits which may occur in the spring compression chamber feed circuit shall not cause a significant variation in the braking force.
2.4.The following requirements shall apply to tractors equipped with spring brakes:
2.4.1.
The feed circuit to the spring compression chamber shall either include an own energy reserve or shall be fed from at least two independent energy reserves. The towed vehicle's pneumatic supply line or hydraulic supplementary line may be branched from this feed line under the condition that a pressure drop in the lines mentioned above shall not be able to apply the spring brake actuators.
2.4.2.
Auxiliary equipment may only draw its energy from the feed line for the spring brake actuators under the condition that its operation, even in the event of damage to the energy source, cannot cause the energy reserve for the spring brake actuators to fall below a level from which one release of the spring brake actuators is possible.
2.4.3.
In any case, during re-charging of the braking system from zero pressure, the spring brakes shall remain fully applied, irrespective of the position of the control device, until the pressure in the service braking system is sufficient to ensure at least the prescribed secondary braking performance of the laden vehicle, using the service braking system control device.
2.4.4.
Once applied, the spring brakes shall not release unless there is sufficient pressure in the service braking system to at least provide the prescribed residual braking performance of the laden vehicle as specified in point 3.1.4 of Annex II by application of the service braking control device.
2.5.On tractors, the system shall be so designed that it is possible to apply and release the brakes at least three times if the initial pressure in the spring compression chamber is equal to the maximum design pressure. In the case of towed vehicles with compressed-air braking systems, it shall be possible to release the brakes at least three times after the towed vehicle has been uncoupled, the pressure in the supply line being 750 kPa before the uncoupling. However, prior to the check the emergency brake shall be released. These conditions shall be satisfied when the brakes are adjusted as closely as possible. In addition, it shall be possible to apply and release the parking braking system as specified in point 2.2.2.10 of Annex I when the trailer is coupled to the tractor.
2.6.In the case of tractors, the pressure in the spring compression chamber at which the springs begin to actuate the brakes, the latter being adjusted as closely as possible, shall not be greater than 80 % of the minimum level of the normal available pressure.
2.7.In the case of towed vehicles with compressed-air braking systems, the pressure in the spring compression chamber at which the springs begin to actuate the brakes shall not be greater than that obtained after four full-stroke actuations of the service braking system in accordance with point 1.3 of Part A of Annex IV. The initial pressure is fixed at 700 kPa.
2.8.In case of towed vehicles with hydraulic braking systems not using stored energy to pressurise the spring compression chamber, the pressure at which the springs begin to actuate the brakes shall not be greater than 1 200 kPa.
2.9.In case of towed vehicles with hydraulic braking systems using stored energy to pressurise the spring compression chamber, the pressure in the spring compression chamber at which the springs begin to actuate the brakes shall not be greater than that obtained after four full-stroke actuations of the service braking system in accordance with point 1.3 of Part C of Annex IV. The initial pressure is fixed at 12 000 kPa. In addition, the pressure in the supplementary line at which the springs begin to actuate the brakes shall not be greater than 1 200 kPa.
2.10.When the pressure in the line feeding energy to the spring compression chamber — excluding lines of an auxiliary release device using a fluid under pressure — falls to the level at which the brake parts begin to move, an optical or audible warning device shall be actuated. Provided this requirement is met, the warning device may comprise the warning signal specified in point 2.2.1.29.1.1 of Annex I. This provision does not apply to towed vehicles.
2.11.If a tractor authorised to tow a vehicle of category R and S with a continuous or semi-continuous braking is fitted with a spring braking system, automatic application of the said system shall cause the application of the towed vehicle's brakes.
2.12.Towed vehicles which utilise the compressed-air service braking system energy reserves to fulfil the requirements for the automatic brake as laid down in point 3.2.3 of Annex II shall also fulfil one of the following requirements when the towed vehicle is uncoupled from the tractor and the towed vehicle park brake control device is in the released position (spring brakes not applied):
2.12.1.
when the energy reserves of the service braking system reduce to a pressure no lower than 280 kPa the pressure in the spring brake compression chamber shall reduce to 0 kPa to fully apply the spring brakes. This requirement shall be verified with a constant service braking system energy reserve pressure of 280 kPa;
2.12.2.
a reduction in the pressure within the service braking system energy reserve results in a corresponding reduction in the pressure in the spring compression chamber.
3. Auxiliary Release System
3.1.A spring braking system shall be so designed that, in the event of a failure in that system, it is still possible to release the brakes. This may be achieved by the use of an auxiliary release device (pneumatic, hydraulic, mechanical, etc.).
Auxiliary release devices using an energy reserve for releasing shall draw their energy from an energy reserve which is independent from the energy reserve normally used for the spring braking system. The pneumatic or hydraulic fluid in such an auxiliary release device may act on the same piston surface in the spring compression chamber which is used for the normal spring braking system under the condition that the auxiliary release device uses a separate line. The junction of this line with the normal line connecting the control device with the spring brake actuators shall be at each spring brake actuator immediately before the port to the spring compression chamber, if not integrated in the body of the actuator. This junction shall include a device which prevents an influence of one line on the other. The requirements laid down in point 2.2.1.5 of Annex I also apply to this device.
3.1.1.For the purposes of the requirement laid down in point 3.1, components of the braking system transmission shall not be regarded as subject to failure if they are not regarded as liable to breakage in accordance with point 2.2.1.2.7 of Annex I, provided that they are made of metal or of a material having similar characteristics and do not undergo significant distortion in normal braking.
3.2.If the operation of the auxiliary device referred to in point 3.1 requires the use of a tool or spanner, that tool or spanner shall be kept on the vehicle.
3.3.Where an auxiliary release system utilises stored energy to release the spring brakes the following additional requirements shall apply:
3.3.1.
Where the control device of the auxiliary spring brake release system is the same as that used for the secondary or parking braking system, the requirements laid down in point 2.4 shall apply in all cases.
3.3.2.
Where the control device for the auxiliary spring brake release system is separate to the secondary or parking braking system control device, the requirements laid down in point 2.3 shall apply to both control systems. However, the requirements laid down in point 2.4.4 shall not apply to the auxiliary spring brake release system. In addition, the auxiliary release control device shall be located so that it is protected against application by the driver from the normal driving position.
3.4.If compressed air is used in the auxiliary release system, the system should be activated by a separate control device, not connected to the spring brake control device.
ANNEX VI Requirements applying to parking braking systems equipped with a mechanical brake-cylinder locking device
1. Definitions
For the purposes of this Annex:
1.1.
‘mechanical brake-cylinder locking device’ means a device which ensures braking operation of the parking braking system by mechanically locking the brake piston rod. Mechanical locking is effected by exhausting the compressed fluid held in the locking chamber; it is so designed that unlocking can be effected by restoring pressure in the locking chamber.
2. Requirements
2.1.The mechanical brake-cylinder locking device shall be designed in such a way that it can be released when the locking chamber is again subjected to pressure.
2.2.When the pressure in the locking chamber approaches the level corresponding to mechanical brake-cylinder locking device, an optical or audible warning system shall be actuated. This provision does not apply to towed vehicles. In the case of towed vehicles the pressure corresponding to mechanical brake-cylinder locking device shall not exceed 4 kPa. It shall be possible to achieve parking braking system performance after any single failure of the towed vehicle service braking system. In addition, it shall be possible to release the brakes at least three times after the towed vehicle has been uncoupled, the pressure in the supply line being 650 kPa before the uncoupling. These conditions shall be satisfied when the brakes are adjusted as closely as possible. It shall also be possible to apply and release the parking braking system as specified in point 2.2.2.10 of Annex I when the towed vehicle is coupled to the tractor.
2.3.In the case of brake actuators fitted with a mechanical brake-cylinder locking device, the brake actuator shall be capable of being actuated by either of two energy reserves.
2.4.The locked brake cylinder may only be released if it is certain that the brake can be operated again after such release.
2.5.In the event of a failure of the source of energy supplying the locking chamber, an auxiliary unlocking device (mechanical or pneumatic, for instance) using, for example, the air in one of the tyres of the vehicle, shall be provided.
2.6.The control device shall be such that, when actuated, it performs the following operations in sequence: it applies the brakes so as to provide the degree of efficiency required for parking braking, locks the brakes in that position and then cancels out the brake-application force.
ANNEX VII Alternative test requirements for vehicles for which Type-I, Type-II or Type-III tests are not mandatory
1. Definitions
For the purposes of this Annex:
1.1.
‘subject towed vehicle’ means a towed vehicle representative of the towed vehicle type for which type-approval is sought;
1.2.
‘identical’ means systems, components, separate technical units and parts having identical geometric and mechanical characteristics and the materials used for the components of the vehicles;
1.3.
‘reference axle’ means an axle for which there is a test report;
1.4.
‘reference brake’ means a brake for which there is a test report.
2. General requirements
Type-I and/or Type-II or Type-III tests, laid out in Annex II, need not be performed on a vehicle and its systems, components and separate technical units submitted for approval in the following cases:
2.1.
The vehicle concerned is a tractor or a towed vehicle which, as regards tyres, braking energy absorbed per axle, and mode of tyre fitting and brake assembly, is identical with respect to braking with a tractor or a towed vehicle which:
2.1.1.
Has passed the Type-I and/or Type-II or Type-III test; and
2.1.2.
Has been approved, with regard to the braking energy absorbed, for mass per axle not lower than that of the vehicle concerned.
2.2.
The vehicle concerned is a tractor or a towed vehicle whose axle or axles are, as regards tyres, braking energy absorbed per axle, and mode of tyre fitting and brake assembly, identical with respect to braking with an axle or axles which have individually passed the Type-I and/or Type-II or Type-III test for masses per axle not lower than that of the vehicle concerned, provided that the braking energy absorbed per axle does not exceed the energy absorbed per axle in the reference test or tests carried out on the individual axle.
2.3.
The vehicle concerned is a tractor equipped with an endurance braking system, other than the engine brake, identical with an endurance braking system already tested under the following conditions:
2.3.1.
The endurance braking system shall, by itself, in a test carried out on a gradient of at least 6 per cent (Type-II test), have stabilised a vehicle whose maximum mass at the time of the test was not less than the maximum mass of the vehicle submitted for approval;
2.3.2.
It shall be verified in the above test that the rotational speed of the rotating parts of the endurance braking system, when the vehicle submitted for approval reaches a road speed of 30 km/h, is such that the retarding torque is not less than that corresponding to the test referred to in point 2.3.1.
2.4.
The vehicle concerned is a towed vehicle equipped with air operated S-cam or disc brakes which satisfy the verification requirements of Appendix 1 relative to the control of characteristics compared to the characteristics given in a report of a reference axle test as shown in the test report. Other brake designs from air operated S-cam or disc brakes may be approved upon presentation of equivalent information.
3. Specific requirements for towed vehicles
In the case of towed vehicles, these requirements are deemed to be fulfilled, with respect to points 2.1 and 2.2, if the identifiers referred to in point 3.7 of Appendix 1 for the axle or brake of the subject towed vehicle are contained in a report for a reference axle/brake.
4. Type-approval certificate
Where the foregoing requirements are applied, the type approval certificate shall include the following particulars:
4.1.
In the case under point 2.1, the approval number of the vehicle subjected to the Type-I and/or Type-II or Type-III test of reference shall be entered.
4.2.
In the case under point 2.2, Table I in the template set out in Article 25(2) of Regulation (EU) No 167/2013 shall be completed.
4.3.
In the case under point 2.3, Table II in the template set out in Article 25(2) of Regulation (EU) No 167/2013 shall be completed.
4.4.
If point 2.4 is applicable, Table III in the template set out in Article 25(2) of Regulation (EU) No 167/2013 shall be completed.
5. Documentation
Where the applicant for a type approval in a Member State refers to a type approval granted in another Member State, the documentation shall be submitted by the applicant relating to that approval.
Appendix 1 Alternative procedures for Type-I or Type-III tests for towed vehicle brakes
1. General
1.1.In accordance with point 2.4, the Type-I or Type-III test may be waived at the time of type approval of the vehicle provided that the braking system components comply with the requirements of this appendix and that the resulting predicted braking performance meets the requirements of this Regulation for the appropriate vehicle category.
1.2.Tests carried out in accordance with the methods detailed in this appendix shall be deemed to meet the above requirements.
1.3.Tests carried out in accordance with point 3.6. and the results in the test report shall be acceptable as a means of proving compliance with the requirements laid down in point 2.2.2.8.1 of Annex I.
1.4.The adjustment of the brake(s) shall, prior to the Type-III test below, be set according to the following procedures as appropriate:
1.4.1.
In the case of air operated towed vehicle brake(s), the adjustment of the brakes shall be such as to enable the automatic brake adjustment device to function. For this purpose the actuator stroke shall be adjusted to:
s0 > 1,1 · sre-adjust
(the upper limit shall not exceed a value recommended by the manufacturer),
Where:
sre-adjust
is the re-adjustment stroke according to the specification of the manufacturer of the automatic brake adjustment device, i.e. the stroke, where it starts to re-adjust the running clearance of the brake with an actuator pressure of 100 kPa.
Where, by agreement with the Technical Service, it is impractical to measure the actuator stroke, the initial setting shall be agreed with the Technical Service.
From the above condition the brake shall be operated with an actuator pressure of 200 kPa, 50 times in succession. This shall be followed by a single brake application with an actuator pressure of ≥ 650 kPa.
1.4.2.
In the case of hydraulically operated towed vehicle disc brakes no setting requirements are deemed necessary.
1.4.3.
In the case of hydraulically operated towed vehicle drum brakes the adjustment of the brakes shall be as specified by the manufacturer.
1.5.In the case of towed vehicles equipped with automatic brake adjustment devices the adjustment of the brakes shall, prior to the Type-I test below, be set according to the procedure as laid down in point 1.4.
2.Symbols used in this Annex are explained in the following table:
2.1.Symbols
P
=
part of the vehicle mass borne by the axle under static conditions
F
=
normal reaction of road surface on the axle under static conditions = P · g
FR
=
total normal static reaction of road surface on all wheels of towed vehicle
Fe
=
test axle load
Pe
=
Fe/g
g
=
acceleration due to gravity: g = 9,81 m/s2
C
=
brake input torque
CO
=
brake input threshold torque
C0,dec
=
declared brake input threshold torque
Cmax
=
maximum brake input torque
R
=
dynamic tyre rolling radius as specified by the tyre manufacturer. As an alternative, if such information is not available, the value calculated by the formula: ‘ETRTO overall diameter /2’ may be used;
T
=
brake force at tyre/road interface
TR
=
total brake force at tyre/road interface of the towed vehicle
M
=
brake torque = T · R
z
=
braking rate = T/F or M/(R · F)
s
=
actuator stroke (working stroke plus free stroke)
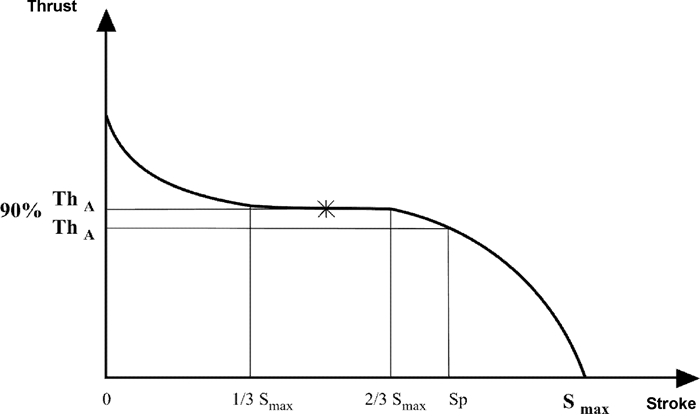
ThA
=
average thrust (the average thrust is determined by integrating the values between 1/3 and 2/3 of the total stroke smax)
l
=
lever length
r
=
internal radius of brake drums or effective radius of brake discs
p
=
brake actuation pressure
Note: Symbols with the suffix ‘e’ relate to the parameters associated with the reference brake test and may be added to other symbols as appropriate.
3. Test methods
3.1.Track tests
3.1.1.The brake performance tests should preferably be carried out on a single axle only.
3.1.2.The results of tests on a combination of axles may be used in accordance with point 2.1 provided that each axle contributes equal braking energy input during the drag and hot brake tests.
3.1.2.1.This is ensured if the following are identical for each axle: braking geometry, lining, wheel mounting, tyres, actuation and pressure distribution in the actuators.
3.1.2.2.The documented result for a combination of axles will be the average for the number of axles, as though a single axle had been used.
3.1.3.The axle(s) should preferably be loaded with the maximum static axle load, though this is not essential provided that due allowance is made during the tests for the difference in rolling resistance caused by a different load on the test axle(s).
3.1.4.Allowance shall be made for the effect of the increased rolling resistance resulting from a combination of vehicles being used to carry out the tests.
3.1.5.The initial speed of the test shall be that prescribed. The final speed shall be calculated by the following formula:

However, in the case of Type-III test, the speed correction formula according to point 2.5.4.2 of Annex II applies
Where:
v1
=
initial speed (km/h),
v2
=
final speed (km/h),
Po
=
mass of the tractor (kg) under test conditions,
P1
=
part of the mass of the towed vehicle borne by the unbraked axle(s) (kg),
P2
=
part of the mass of the towed vehicle borne by the braked axle(s) (kg).
3.2.Inertia dynamometer tests
3.2.1.The test machine shall have a rotary inertia simulating that part of the linear inertia of the vehicle mass acting upon one wheel, necessary for the cold performance and hot performance tests, and capable of being operated at constant speed for the purpose of the test described in points 3.5.2 and 3.5.3.
3.2.2.The test shall be carried out with a complete wheel, including the tyre, mounted on the moving part of the brake, as it would be on the vehicle. The inertia mass may be connected to the brake either directly or via the tyres and wheels.
3.2.2.1.By way of derogation from point 3.2.2, the test may be also carried out without a tyre under the condition that no cooling is permitted. However, in order to suck away toxic or harmful gases from the test chamber a small air circulation is permitted.
3.2.3.Under the conditions specified in point 3.2.2, air cooling at a velocity and air flow direction simulating actual conditions may be used during the heating runs, the speed of the air flow being
vair = 0,33 v
Where:
v
=
vehicle test speed at initiation of braking.
The temperature of the cooling air shall be the ambient temperature.
3.2.4.Where the tyre rolling resistance is not automatically compensated for in the test, the torque applied to the brake shall be modified by subtracting a torque equivalent to a rolling resistance coefficient of 0,02 (in the case of vehicles of categories Ra and Sa) and 0,01 (in the case of vehicles of categories Rb and Sb) respectively.
Alternatively, the worst case rolling resistance coefficient of 0,01 may be used in order to cover all vehicle categories which may be subjected to the Type-I test, as determined in the test report.
3.3.Rolling road dynamometer tests
3.3.1.The axle should preferably be loaded with the maximum static axle mass though this is not essential provided that due allowance is made during the tests for the difference in rolling resistance caused by a different mass on the test axle.
3.3.2.Air cooling at a velocity and air flow direction simulating actual conditions may be used during the heating runs, the speed of the air flow being
vair = 0,33 v
Where:
v
=
vehicle test speed at initiation of braking.
The temperature of the cooling air shall be the ambient temperature.
3.3.3.The braking time shall be 1 second after a maximum build-up time of 0,6 second.
3.4.Test conditions (General)
3.4.1.The test brake(s) shall be instrumented so that the following measurements can be taken:
3.4.1.1.
A continuous recording to enable the brake torque or force at the periphery of the tyre to be determined;
3.4.1.2.
A continuous recording of air pressure in the brake actuator;
3.4.1.3.
Vehicle speed during the test;
3.4.1.4.
Initial temperature on the outside of the brake drum or brake disc;
3.4.1.5.
Brake actuator stroke used during Type-0 and Type-I or Type-III tests.
3.5.Test procedures
3.5.1.Supplementary cold performance test
The preparation of the brake shall be in accordance with point 3.5.1.1.
3.5.1.1.Bedding in (burnishing) procedure
3.5.1.1.1.In the case of drum brakes the tests shall start with new brake linings and new drum(s), the brake linings shall be machined to achieve the best possible initial contact between the linings and drum(s).
3.5.1.1.2.In the case of disc brakes the tests shall start with new brake pads and new disc(s), machining of the pad material shall be at the discretion of the brake manufacturer.
3.5.1.1.3.Make 20 brake applications from an initial speed of 60 km/h with an input to the brake theoretically equal to 0,3 TR/Test Mass. The initial temperature at the lining/drum or pad/disc interface shall not exceed 100 °C before each brake application.
3.5.1.1.4.Carry out 30 brake applications from 60 km/h to 30 km/h with an input to the brake equal to 0,3 TR/Test Mass and with a time interval between applications of 60 s. If the track test method or the rolling road test methods are to be utilised, energy inputs equivalent to those specified shall be used. The initial temperature at the lining/drum or pad/disc interface on the first brake application shall not exceed 100 °C.
3.5.1.1.5.On completion of the 30 brake applications specified in point 3.5.1.1.4 and after an interval of 120 s carry out 5 brake applications from 60 km/h to 30 km/h with an input to the brake equal to 0,3 TR/Test Mass and with an interval of 120 s between applications.
3.5.1.1.6.Make 20 brake applications from an initial speed of 60 km/h with an input to the brake equal to 0,3 TR/Test Mass. The initial temperature at the lining/drum or pad/disc interface shall not exceed 150 °C before each brake application.
3.5.1.1.7.Carry out a performance check as follows:
3.5.1.1.7.1.
Calculate the input torque to produce theoretical performance values equivalent to 0,2, 0,35 and 0,5 + 0,05 TR/Test Mass.
3.5.1.1.7.2.
Once the input torque value has been determined for each braking rate, this value shall remain constant throughout each and subsequent brake applications (e.g. constant pressure).
3.5.1.1.7.3.
Make a brake application with each of the input torques determined in point 3.5.1.1.7.1 from an initial speed of 60 km/h. The initial temperature at the lining/drum or pad/disc interfaces shall not exceed 100 °C before each application.
3.5.1.1.8.Repeat the procedures laid down in point 3.5.1.1.6 and 3.5.1.1.7.3, where point 3.5.1.1.6 is optional, until the performance of five consecutive non monotonic measurements at the 0,5 TR/(Test Mass) constant input value has stabilised within a tolerance of minus 10 per cent of the maximum value.
3.5.1.2.It is also permissible to carry out the two fade tests, Type-I and Type- III, one after the other.
3.5.1.3.This test is carried out at an initial speed equivalent to 40 km/h in the case of Type-I test and 60 km/h in the case of Type-III test in order to evaluate the hot braking performance at the end of Type-I and Type-III tests. The Type-I and/or Type-III fade test has/have to be done immediately after this cold performance test.
3.5.1.4.Three brake applications are made at the same pressure (p) and at an initial speed equivalent to 30 km/h and 40 km/h respectively (in the case of Type-I test, as determined in the test report) or 60 km/h (in the case of Type-III test), with an approximately equal initial brake temperature not exceeding 100 °C, measured at the outside surface of the drums or discs. The applications shall be at the brake actuator pressure required to give a brake torque or force equivalent to a braking rate (z) of at least 50 per cent. The brake actuator pressure shall not exceed 650 kPa (pneumatic) or 11 500 kPa (hydraulic), and the brake input torque (C) shall not exceed the maximum permissible brake input torque (Cmax). The average of the three results shall be taken as the cold performance.
3.5.2.Fade test (Type-I test)
3.5.2.1.This test is carried out at a speed equivalent to 40 km/h with an initial brake temperature not exceeding 100 °C, measured at the outside surface of the drum or brake disc.
3.5.2.2.A braking rate is maintained at 7 per cent, including the rolling resistance (see point 3.2.4.).
3.5.2.3.The test is made during 2 minutes and 33 seconds or during 1,7 km at a vehicle speed of 40 km/h. In case of towed vehicles with vmax ≤ 30 km/h or if the test velocity cannot be achieved, then the duration of the test can be lengthened according to point 2.3.2.2 of Annex II.
3.5.2.4.Not later than 60 seconds after the end of the Type-I test, a hot performance test is carried out in accordance with point 2.3.3 of Annex II at an initial speed equivalent to 40 km/h. The brake actuator pressure shall be that used during the Type-0 test.
3.5.3.Fade test (Type-III test)
3.5.3.1.Test methods for repeated braking
3.5.3.1.1.Track tests (see Annex II, point 2.5)
3.5.3.1.2.Inertia dynamometer test
For the bench test described in point 3.2, the conditions may be the same as for the road test described in point 2.5.4 of Annex II with:

3.5.3.1.3.Rolling road dynamometer test
For the bench test described in point 3.3, the conditions shall be as follows:
| Number of brake applications | 20 |
| Duration of braking cycle | 60 s (braking time 25 s and recovery time 35 s) |
| Test speed | 30 km/h |
| Braking rate | 0,06 |
| Rolling resistance | 0,01 |
3.5.3.2.Not later than 60 seconds after the end of the Type-III test a hot performance test is carried out in accordance with point 2.5.5 of Annex II. The brake actuator pressure shall be that used during the Type-0 test.
3.6.Performance requirements for automatic brake adjustment devices
3.6.1.The following requirements shall apply to an automatic brake adjustment device which is installed on a brake, the performance of which is being verified according to the provisions of this appendix.
On completion of the tests defined in points 3.5.2.4 (Type-I test) or 3.5.3.2 (Type-III test), the requirements laid down in point 3.6.3 shall be verified.
3.6.2.The following requirements shall apply to an alternative automatic brake adjustment device installed on a brake for which a test report already exists.
3.6.2.1.Brake performance
Following heating of the brake(s) carried out in accordance with the procedures described in points 3.5.2 (Type-I test) or 3.5.3 (Type-III test), as appropriate, one of the following provisions shall apply:
(a)
the hot performance of the service braking system shall be ≥ 80 per cent of the prescribed Type-0 performance; or
(b)
the brake shall be applied with a brake actuator pressure as used during the Type-0 test; at this pressure the total actuator stroke (sA) shall be measured and shall be ≤ 0,9 sp value of the brake chamber.
sp
=
the effective stroke means the stroke at which the output thrust is 90 % of the average thrust (ThA) — see point 2.
3.6.2.2.On completion of the tests specified in point 3.6.2.1, the requirements laid down in point 3.6.3 shall be verified.
3.6.3.Free running test
After completing the tests specified in points 3.6.1 or 3.6.2, as applicable, the brake(s) shall be allowed to cool to a temperature representative of a cold brake (i.e. ≤ 100 °C) and it should be verified that the towed vehicle/wheel(s) is capable of free running by fulfilling one of the following conditions:
3.6.3.1.
Wheels are running freely (i.e. wheels can be rotated by hand);
3.6.3.2.
It is ascertained that at a constant speed equivalent to v = 60 km/h with the brake(s) released the asymptotic temperature shall not exceed a drum/disc temperature increase of 80 °C, then this residual brake moment is regarded as acceptable.
3.7.Identification
3.7.1.The axle shall carry at a visible position the marking in accordance with the requirements laid down on the basis of Article 17(2)(k) and (5) of Regulation (EU) No 167/2013, so that the following data are uniquely identified, as mentioned in the test report:
3.7.1.1.
Axle identifier;
3.7.1.2.
Brake identifier;
3.7.1.3.
Fe identifier;
3.7.1.4.
Base part of test report number;
3.7.1.5.
The identifiers specified in the test report.
3.7.2.A non-integrated automatic brake adjustment device shall carry at a visible position at least the marking in accordance with the requirements laid down on the basis of Article 17(2)(k) and (5) of Regulation (EU) No 167/2013 so that the following data are uniquely identified, as mentioned in the test report:
3.7.2.1.
Type;
3.7.2.2.
Version.
3.7.3.The make and type of each brake lining or pad shall be visible when the lining or pad is mounted on the brake shoe or back plate in a legible and indelible manner.
3.8.Test criteria
In the case that a new test report, or a test report extension, is required for a modified axle or brake within the limits specified in the information document the following criteria are used to determine the necessity for further testing taking into account worst case configurations agreed with the Technical Service.
Abbreviations used in the subsequent table:
| a No test is required if the manufacturer can demonstrate that a change does not affect the stiffness. | |
| Differences according to the information document | Test criteria |
|---|---|
(a) Increase in maximum declared brake input torque Cmax | Change allowed without additional testing |
(b) Deviation of declared brake disc and brake drum mass mdec: ± 20 per cent | CT: The lightest variant shall be tested; if the nominal test mass for a new variant deviates less than 5 per cent from a previously tested variant with a higher nominal value then the test of the lighter version may be dispensed with. The actual test mass of the test specimen may vary ± 5 per cent from the nominal test mass. |
(c) Method of attachment of the lining/pad on the brake shoe/back plate | The worst case specified by the manufacturer and agreed by the Technical Services conducting the test |
(d) In the case of disc brakes, increase of maximum stroke capability of the brake | Change allowed without additional testing |
(e) Effective length of the cam shaft | The worst case is considered to be the lowest cam shaft torsional stiffness and shall be verified by either: (i) FT; or (ii) Change allowed without additional testing if by calculation the influence with respect to stroke and braking force can be shown. In this case the test report shall indicate the following extrapolated values: se, Ce, Te, Te/Fe. |
(f) Declared threshold torque C0,dec | It shall be checked that the brake performance remains within the corridors of Diagram 1 |
(g) ± 5 mm from the declared external diameter of the disc | The worst case test is considered the smallest diameter The actual external diameter of the test specimen may vary ± 1 mm from the nominal external diameter specified by the axle manufacturer. |
(h) Type of cooling of the disc (ventilated/non-ventilated) | Each type shall be tested |
(i) Hub (with or without integrated hub) | Each type shall be tested |
(j) Disc with integrated drum — with or without parking braking system function | Testing is not required for this feature |
(k) Geometric relationship between disc friction surfaces and disc mounting | Testing is not required for this feature |
(l) Brake lining type | Each type of brake lining |
(m) Material variations (excluding changes in base material), as in the information document for which the manufacturer confirms that such a material variation does not change the performance with respect to the required tests | Test not required for this condition |
(n) Back plate and shoes | Worst case test conditionsa: Back plate : minimum thickness Shoe : lightest brake shoe |
3.8.1.If an automatic brake adjustment device deviates from a tested one with reference to the identifiers of the test report, an additional test according to point 3.6.2 is necessary.
3.9.Test results
3.9.1.The result of tests carried out in accordance with points 3.5 and 3.6.1 shall be reported on the test results sheet.
3.9.2.In the case of a brake installed with an alternative brake adjustment device the results of tests carried out in accordance with point 3.6.2 shall be reported on the test results sheet.
3.9.3.Information document
An information document, provided by the axle or vehicle manufacturer, shall be part of the test report.
The information document shall identify, if applicable, the various variants of the brake or axle equipment with respect to their essential criteria.
4. Verification
4.1.Verification of components
The brake specification of the vehicle to be type approved shall comply with the requirements laid down in points 3.7, 3.8 and 3.9.
4.2.Verification of brake energy absorbed
4.2.1.The brake forces (T) for each subject brake (for the same control line pressure pm) necessary to produce the drag force specified for both Type-I and Type-III test conditions shall not exceed the values Te as stated in the test report, which were taken as a basis for the test of the reference brake.
4.3.Verification of hot performance
4.3.1.The brake force (T) for each subject brake for a specified pressure (p) in the actuators and for a control line pressure (pm) used during the Type-0 test of the subject towed vehicle is determined as follows:
4.3.1.1.
The predicted actuator stroke (s) of the subject brake is calculated as follows:

This value shall not exceed sp.
4.3.1.2.
The average thrust output (ThA) of the actuator fitted to the subject brake at the pressure specified in point 4.3.1 is measured.


4.3.2.The predicted brake performance for the subject towed vehicle is given by:

4.3.3.The hot performances following the Type-I or Type-III tests shall be determined in accordance with points 4.3.1.1 to 4.3.1.4. The resulting predictions given by point 4.3.2 shall satisfy the requirements of this Regulation for the subject towed vehicle. The value used for the figure recorded in the Type-0 test as prescribed in point 2.3.3 or 2.5.5 of Annex II shall be the figure recorded in the Type-0 test of the subject towed vehicle.

ANNEX VIII Requirements applying to the testing of inertia braking systems, braking devices and trailer braking couplings and of vehicles fitted with them as regards braking
1. General provisions
1.1.The inertia braking system of a towed vehicle comprises the control device, the transmission and the brake.
1.2.The control device is the aggregate of the components integral with the traction device (coupling head).
1.3.The transmission is the aggregate of the components comprised between the last part of the coupling head and the first part of the brake.
1.4.Braking systems in which accumulated energy (e.g. electric, pneumatic or hydraulic energy) is transmitted to the towed vehicle by the tractor and is controlled only by the thrust on the coupling do not constitute inertia braking systems within the meaning of this Regulation.
1.5.Tests
1.5.1.Determination of essential characteristics of the brake.
1.5.2.Determination of essential characteristics of the control device and verification of the conformity of the control device with the provisions of this Regulation.
1.5.3.Checking on the vehicle:
1.5.3.1.
the compatibility of the control device and the brake; and
1.5.3.2.
the transmission.
2. Symbols
2.1.Units used
2.1.1.
Mass: kg;
2.1.2.
Force: N;
2.1.3.
Acceleration due to gravity: g = 9,81 m/s2
2.1.4.
Torques and moments: Nm;
2.1.5.
Areas: cm2;
2.1.6.
Pressures: kPa;
2.1.7.
Lengths: unit specified in each case.
2.2.Symbols valid for all types of brakes (see Figure 1 of Appendix 1)
2.2.1. GA
:
towed vehicle's technically permissible ‘maximum mass’ as declared by the manufacturer;
2.2.2. G′A
:
towed vehicle's ‘maximum mass’ capable of being braked by the control device, as declared by the manufacturer;
2.2.3. GB
:
towed vehicle's ‘maximum mass’ capable of being braked by joint operation of all of the towed vehicle's brakes
GB = n · GBo
2.2.4. GBo
:
fraction of towed vehicle's permissible maximum mass capable of being braked by one brake, as declared by the manufacturer;
2.2.5. B*
:
required braking force;
2.2.6. B
:
required braking force taking account of rolling resistance;
2.2.7. D*
:
permissible thrust on coupling;
2.2.8. D
:
thrust on coupling;
2.2.9. P′
:
control device output force;
2.2.10. K
:
supplementary force of control device, conventionally designated by the force D corresponding to the point of intersection with the axis of the abscissae of the extrapolated curve expressing P′ in terms of D, measured with the device in the mid-travel position (see Figures 2 and 3 of Appendix 1);
2.2.11. KA
:
force threshold of control device, i.e., the maximum thrust on the coupling head which can be applied for a short period of time without generating an output force from the control device. The symbol KA is conventionally applied to the force measured when the coupling head begins to be pushed home at a speed of 10 to 15 mm/s, the control device transmission being uncoupled;
2.2.12. D1
:
the maximum force applied to the coupling head when it is being pushed home at a speed of s mm/s + 10 %, the transmission being uncoupled;
2.2.13. D2
:
the maximum force applied to the coupling head when it is being pulled at a speed of s mm/s + 10 % out of the position of maximum compression, the transmission being uncoupled;
2.2.14. ηHo
:
efficiency of inertia control device;
2.2.15. ηH1
:
efficiency of transmission system;
2.2.16. ηH
:
overall efficiency of control device and transmission ηH = ηHo · ηH1;
2.2.17. s
:
travel of control device in millimetres;
2.2.18. s′
:
effective (useful) travel of control device in millimetres, determined in the test report;
2.2.19. s″
:
spare travel of master cylinder, measured in millimetres at coupling head;
2.2.19.1. sHz
:
stroke of the master cylinder in millimetres according to Figure 8 of Appendix 1;
2.2.19.2. s″Hz
:
spare travel of the master cylinder in millimetres at piston rod, according to Figure 8 of Appendix 1;
2.2.20. so
:
loss of travel, i.e., travel in millimetres of the coupling head when the latter is so actuated as to move from 300 mm above to 300 mm below the horizontal, the transmission remaining stationary;
2.2.21. 2sB
:
brake-shoe lift (brake-shoe application travel), in millimetres, measured on diameter parallel to applying device, the brakes not being adjusted during the test;
2.2.22. 2sB*
:
minimum brake shoe centre lift (minimum brake shoe application travel) (in millimetres) for wheel brakes with drum brakes

2r being the diameter of the brake drum in millimetres (see Figure 4 of Appendix 1).

For wheel brakes with disc brakes with hydraulic transmission
Where:
V60
=
fluid volume absorbed by one wheel brake at a pressure corresponding to a braking force of 1,2 B* = 0,6 · GBo and a maximum tyre radius;
and
2rA
=
outer diameter of brake disc (V60 in cm3, FRZ in cm2 and rA in mm).
2.2.23. M*
:
braking torque as specified by the manufacturer in point 5 of Appendix 3 of this Annex. This braking torque shall produce at least the prescribed braking force B*;
2.2.23.1. MT
:
test braking torque in the case where no overload protector is fitted (according to point 6.2.1);
2.2.24. R
:
dynamic tyre rolling radius (m), as specified by the tyre manufacturer. As an alternative, if such information is not available, the value calculated by the formula: ‘ETRTO overall diameter/2’ may be used;
2.2.25. n
:
number of brakes.
2.2.26. Mr
:
maximum braking torque resulting from the maximum permissible travel sr or the maximum permissible fluid volume Vr when the towed vehicle moves rearward (including rolling resistance = 0,01 · g · GBo);
2.2.27. sr
:
maximum permissible travel at the brake control lever when the towed vehicle moves rearward;
2.2.28. Vr
:
maximum permissible fluid volume absorbed by one braking wheel when the towed vehicle moves rearward;
2.3.Symbols valid for mechanical-transmission braking systems (see Figure 5 of Appendix 1 )
2.3.1. iHo
:
reduction ratio between travel of coupling head and travel of lever at output side of control device;
2.3.2. iH1
:
reduction ratio between travel of lever at output side of control device and travel of brake lever (gearing down of transmission);
2.3.3. iH
:
reduction ratio between travel of coupling head and travel of brake lever
iH = iHo · iH1
2.3.4. ig
:
reduction ratio between travel of brake lever and lift (application travel) at brake-shoe centre (see Figure 4 of Appendix 1);
2.3.5. P
:
force applied to the brake control lever; (see Figure 4 of Appendix 1);
2.3.6. Po
:
brake-retraction force when the towed vehicle moves forward, i.e., in graph M = f(P), the value of the force P at the point of intersection of the extrapolation of this function with the abscissa (see Figure 6 of Appendix 1);
2.3.6.1. Por
:
brake-retraction force when the towed vehicle moves rearward (see Figure 6 of Appendix 1);
2.3.7. P*
:
force applied to the brake control lever to produce the braking force B*;
2.3.8. PT
:
test force according to point 6.2.1;
2.3.9. ρ
:
characteristic of the brake when the towed vehicle moves forward as defined from:
M = ρ (P – Po)
2.3.9.1. ρr
:
characteristic of the brake when the towed vehicle moves rearward as defined from:
Mr = ρr (Pr – Por)
2.3.12. scd
:
differential travel at compensator when only one brake operates in the forward direction and the other in the reverse direction(4);
Where: scd = scr – scf (see Figure 5A of Appendix 1);
2.4.Symbols valid for hydraulic-transmission braking systems (see Figure 8 of Appendix 1)
2.4.1. ih
:
reduction ratio between travel of coupling head and travel of piston in master cylinder;
2.4.2. i′g
:
reduction ratio between travel of cylinder thrust point and lift (application travel) of brake-shoe centre;
2.4.3. FRZ
:
surface area of piston of one wheel cylinder for drum brake(s); for disc brake(s), sum of the surface area of the caliper piston(s) on one side of the disc;
2.4.4. FHZ
:
surface area of piston in master cylinder;
2.4.5. p
:
hydraulic pressure in brake cylinder;
2.4.6. po
:
retraction pressure in the brake cylinder when the towed vehicle moves forward; i.e., in graph of M = f(p), the value of the pressure p at the point of intersection of the extrapolation of this function with the abscissa (see Figure 7 of Appendix 1);
2.4.6.1. por
:
brake retraction pressure when the towed vehicle moves rearward (see Figure 7 of Appendix 1 );
2.4.7. p*
:
hydraulic pressure in the brake cylinder to produce the braking force B*;
2.4.8. pT
:
test pressure according to point 6.2.1:
2.4.9. ρ′
:
characteristic of the brake when the towed vehicle moves forward as defined from:
M = ρ′ (p – po)
2.4.9.1. ρ′r
:
characteristic of the brake when the towed vehicle moves rearward as defined from:
Mr = ρ′r (pr – por)
2.5.Symbols with respect to the braking requirements relating to overload protectors
2.5.1. Dop
:
application force at the input side of the control device, at which the overload protector is activated
2.5.2. Mop
:
brake torque at which the overload protector is activated (as declared by the manufacturer)
2.5.3. MTop
:
minimum test braking torque in the case when an overload protector is fitted (according to point 6.2.2.2).
2.5.4. Pop_min
:
force applied to the brake at which the overload protector is activated (according to point 6.2.2.1).
2.5.5. Pop_max
:
maximum force (when the coupling head is pushed fully home) which is applied by the overload protector to the brake (according to point 6.2.2.3).
2.5.6. pop_min
:
pressure applied to the brake at which the overload protector is activated (according to point 6.2.2.1).
2.5.7. pop_max
:
maximum hydraulic pressure (when the coupling head is pushed fully home) which is applied by the overload protector to the brake actuator (according to point 6.2.2.3).
2.5.8. PTop
:
minimum test brake force in the case when an overload protector is fitted (according to point 6.2.2.2).
2.5.9. pTop
:
minimum test brake pressure in the case when an overload protector is fitted (according to point 6.2.2.2).
2.6Types of vehicle classes with regard to inertia braking systems
2.6.1.Vehicle Class A
Vehicle Class A means vehicles of categories R1, R2 and S1
2.6.2.Vehicle Class B
Vehicle Class B means vehicles with a mass exceeding 3 500 kg and not exceeding 8 000 kg of categories R3 and S2
2.6.3.Vehicle Class C
Vehicle Class C1 means vehicles of categories R and S with maximum design speed not exceeding 30 km/h
Vehicle Class C2 means vehicles of categories R and S with maximum design speed not exceeding 40 km/h
Vehicle Class C3 means vehicles of categories R and S with maximum design speed exceeding 40 km/h
3. General requirements
3.1.The transmission of force from the coupling head to the towed vehicle's brakes shall be effected either by rod linkage or by one or more fluids. However, a sheathed cable (Bowden cable) may provide part of the transmission; this part shall be as short as possible. The control rods and cables shall not contact the towed vehicle frame or other surfaces that may affect the application or release of the brake.
3.2.All bolts at joints shall be adequately protected. In addition, these joints shall be either self-lubricating or readily accessible for lubrication.
3.3.Inertia braking devices shall be so arranged that in the case when the coupling head travels to its fullest extent, no part of the transmission seizes, undergoes permanent distortion, or breaks. This shall be checked by uncoupling the end of the transmission from the brake control levers.
3.4.The inertia braking system shall allow the towed vehicle to be reversed with the tractor without imposing a sustained drag force exceeding 0,08 g · GA. Devices used for this purpose shall act automatically and disengage automatically when the towed vehicle moves forward.
3.5.Any special device incorporated for the purpose of point 3.4 shall be such that the parking performance when facing up a gradient shall not be adversely affected.
3.6.Inertia braking systems may incorporate overload protectors. They shall not be activated at a force of less than Dop = 1,2 · D* (when fitted at the control device) or at a force of less than Pop = 1,2 · P* or at a pressure of less than pop = 1,2 · p* (when fitted at the brake) where the force P* or the pressure p* corresponds to a braking force of B* = 0,5 · g · GBo (in the case of Classes C2 and C3 vehicles) and B* = 0,35 · g · GBo (in the case of Class C1 vehicles).
4. Requirements for control devices
4.1.The sliding members of the control device shall be long enough to enable the full travel to be used even when the towed vehicle is coupled.
4.2.The sliding members shall be protected by a bellows or some equivalent device. They shall either be lubricated or be constructed of self-lubricating materials. The surfaces in frictional contact shall be made of a material such that there is neither electrochemical torque nor any mechanical incompatibility liable to cause the sliding members to seize.
4.3.The stress threshold (KA) of the control device shall be not less than 0,02 g · G′A and not more than 0,04 g · G′A. However, in the case of classes C1 and C2 vehicles the stress threshold (KA) of the control device may be in the range between 0,01 g · G′A and 0,04 g · G′A.
4.4.The maximum insertion force D1 shall not exceed 0,10 g · G′A in rigid drawbar towed vehicles and centre-axle towed vehicles and 0,067 g · G′A in multi-axled drawbar towed vehicles.
4.5.The maximum tractive force D2 shall be not less than 0,1 g · G′A and not more than 0,5 g · G′A.
In the case of vehicles of class B, also the condition D2 ≥ 1 750 N + 0,05 g · G′A is permitted as long as D2 ≤ 0,5 g · G′A.
5. Tests and measurements to be carried out on the control devices
5.1.Control devices submitted to the Technical Service conducting the tests shall be checked for conformity with the requirements laid down in points 3 and 4.
5.2.The following shall be measured in respect of all types of brakes:
5.2.1.
Travel s and effective travel s′;
5.2.2.
Supplementary force K;
5.2.3.
Force threshold KA;
5.2.4.
Insertion force D1;
5.2.5.
Tractive force D2.
5.3.In the case of mechanical-transmission inertia braking systems, the following should be determined:
5.3.1.
The reduction ratio iHo measured at the mid-travel position of the control;

5.4.In the case of hydraulic-transmission inertia braking systems, the following shall be determined:
5.4.1.
The reduction ratio ih measured at the mid-travel position of the control device;
5.4.2.
The master cylinder output pressure p as a function of the thrust D on the drawbar and of the surface area FHZ of the master-cylinder piston, as specified by the manufacturer; the supplementary force K and the efficiency are derived from the representative curve obtained from these measurements

(see Figure 3 of Appendix 1);
5.4.3.
The spare travel of the master cylinder s″, as referred to in point 2.2.19;
5.4.4.
Surface area FHZ of the piston in the master cylinder;
5.4.5.
Stroke sHz of the master cylinder (in millimetres);
5.4.6.
Spare travel s″Hz of the master cylinder (in millimetres).
5.5.In the case of inertia braking system on multi-axled drawbar towed vehicles, the loss of travel so referred to in the test report shall be measured.
6. Requirements for brakes
6.1.In addition to the brakes to be checked, the manufacturer shall submit to the Technical Service conducting the tests, drawings of the brakes showing the type, dimensions and material of the essential components and the make and type of the linings. In the case of hydraulic brakes, these drawings shall show the surface area FRZ of the brake cylinders. The manufacturer shall also specify the braking torque M* and the mass GBo specified in point 2.2.4.
6.2.Testing conditions
6.2.1.In the case when an overload protector is neither fitted nor intended to be fitted within the inertia braking system, the wheel brake shall be tested with the following test forces or pressures:
PT = 1,8 P* or pT = 1,8 p* and MT = 1,8 M* as appropriate.
6.2.2.In the case when an overload protector is fitted or intended to be fitted within the inertia braking system, the wheel brake shall be tested with the following test forces or pressures:
6.2.2.1.
The minimum design values for an overload protector shall be specified by the manufacturer and shall not be less than
Pop = 1,2 P* or pop = 1,2 p*
6.2.2.2.
The ranges of minimum test force PTop or minimum test pressure pTop and the minimum test torque MTop are:
PTop = 1,1 to 1,2 P* or pTop = 1,1 to 1,2 p*
and
MTop = 1,1 to 1,2 M*
6.2.2.3.
The maximum values (Pop_max or pop_max) for the overload protector shall be specified by the manufacturer and shall not be more than PT or pT respectively.
7. Tests and measurements to be carried out on the brakes
7.1.Brakes and components submitted to the Technical Service conducting the tests shall be tested for conformity with the requirements of point 6.
7.2.The following should be determined:
7.2.1.
The minimum brake-shoe lift (minimum brake-shoe application travel), 2sB*;
7.2.2.
The brake-shoe centre lift (brake-shoe application travel) 2sB (which shall be greater than 2sB*);
7.3.In the case of mechanical brakes, the following shall be determined:
7.3.1.
Reduction ratio ig (see Figure 4 of Appendix 1);
7.3.2.
Force P* for braking torque M*;
7.3.3.
Torque M* as a function of the force P* applied to the control lever in mechanical-transmission systems.
The rotational speed of the braking surfaces shall correspond to an initial vehicle speed of 30 km/h in the case of Class C1 vehicle, 40 km/h in the case of Class C2 vehicle, 60 km/h in the case of Class C3 vehicle, when the towed vehicle moves forward and 6 km/h when the towed vehicle moves rearward. The following shall be derived from the curve obtained from these measurements (see Figure 6 of Appendix 1):
7.3.3.1.
The brake-retraction force Po and the characteristic value ρ when the trailer moves forward;
7.3.3.2.
The brake-retraction force Por and the characteristic value ρr when the towed vehicle moves rearward;
7.3.3.3.
Maximum braking torque Mr up to the maximum permissible travel sr when the towed vehicle moves rearward (see Figure 6 of Appendix 1);
7.3.3.4.
Maximum permissible travel at the brake control lever when the towed vehicle moves rearward (see Figure 6 of Appendix 1).
7.4.In the case of hydraulic brakes, the following shall be determined:
7.4.1.
Reduction ratio ig′ (see Figure 8 of Appendix 1)
7.4.2.
Pressure p* for braking torque M*
7.4.3.
Torque M* as a function of the pressure p* applied to the brake cylinder in hydraulic transmission systems.
The rotational speed of the braking surfaces shall correspond to an initial vehicle speed of 30 km/h in the case of Class C1 vehicle, 40 km/h in the case of Class C2 vehicle, 60 km/h in the case of Class C3 vehicle, when the towed vehicle moves forward and 6 km/h when the towed vehicle moves rearward. The following shall be derived from the curve obtained from these measurements (see Figure 7 of Appendix 1):
7.4.3.1.
The retraction pressure po and the characteristic ρ′ when the towed vehicle moves forward;
7.4.3.2.
The retraction pressure por and the characteristic ρ′r when the towed vehicle moves rearward;
7.4.3.3.
Maximum braking torque Mr up to the maximum permissible fluid volume Vr when the towed vehicle moves rearward (see Figure 7 of Appendix 1);
7.4.3.4.
Maximum permissible fluid volume Vr absorbed by one braking wheel when the towed vehicle moves rearward (see Figure 7 of Appendix 1).
7.4.4.
Surface area FRZ of the piston in the brake cylinder.
7.5.Alternative procedure for the Type-I test
7.5.1.The Type-I test according to Annex II, point 2.3 does not have to be carried out on a vehicle submitted for type approval, if the braking system components are tested on an inertia test bench to meet the prescriptions of Annex II, points 2.3.2 and 2.3.3.
7.5.2.The alternative procedure for the Type-I test shall be carried out in accordance with the provisions laid down in Annex VII, Appendix 1, point 3.5.2 (in analogy also applicable for disc brakes).
8. Simulated gradient parking braking system force differential
8.1.Calculation method
8.1.1.The pivot points in the compensator shall lie in a straight line with the park brake at the rest position.

Alternative arrangements can be used, if they provide equal tension in both rear cables, even when there are differences in travel between the rear cables.
8.1.2.Drawing details are to be provided to demonstrate that the compensator articulation is sufficient to ensure equal cable tension is applied to each of the rear cables. The compensator needs to have sufficient distance across the width to facilitate the differential travels left to right. The jaws of the yokes also need to be deep enough relative to their width to make sure that they do not prevent articulation when the compensator is at an angle.
Differential travel at compensator (scd) shall be derived from:

Where:
| Sc′ = S′/iH | (travel at compensator — forward operation) and Sc′ = 2 · SB/ig |
| Scr = Sr/iH | (travel at compensator — rearward operation) |
9. Test reports
Applications for the approval of towed vehicles equipped with inertia braking systems shall be accompanied by the test reports relating to the control device and the brakes and the test report on the compatibility of the inertia type control device, the transmission device and the brakes of the towed vehicle, these reports including at least the particulars prescribed on the basis of Article 27(1) of Regulation (EU) No 167/2013.
10. Compatibility between the control device and the brakes of a vehicle
10.1.A check shall be made on the vehicle to verify in the light of the characteristics of the control device, the characteristics of which are mentioned in the test report, the characteristics of the brakes mentioned in the test report and the towed vehicle characteristics referred to in the test report, whether the towed vehicle's inertia braking system meets the prescribed requirements.
10.2.General checks for all types of brakes
10.2.1.Any parts of the transmission not checked at the same time as the control device or the brakes shall be checked on the vehicle. The results of the check shall be entered in the test report (e.g., iH1 and ηH1).
10.2.2.Mass
10.2.2.1.The maximum mass GA of the towed vehicle shall not exceed the maximum mass G′A for which the control device is authorised.
10.2.2.2.The maximum mass GA of the towed vehicle shall not exceed the maximum mass GB which can be braked by joint operation of all of the towed vehicle's brakes.
10.2.3.Forces
10.2.3.1.The force threshold KA shall not be below 0,02 g · GA and not above 0,04 g · GA.
10.2.3.2.The maximum insertion force D1 may not exceed 0,10 g · GA in rigid drawbar towed vehicles and centre-axle towed vehicles and 0,067 g · GA in multi-axled drawbar towed vehicles.
10.2.3.3.The maximum tractive force D2 shall be between 0,1 g · GA and 0,5 g · GA.
10.3.Check of braking efficiency
10.3.1.The sum of the braking forces exerted on the circumference of the towed vehicle wheels shall not be less than B* = 0,50 g · GA (in the case of Classes C2 and C3 vehicles) and B* = 0,35 · g · GA (in the case of Class C1 vehicles), including a rolling resistance of 0,01 g · GA: this corresponds to a braking force B of 0,49 g · GA (in the case of Classes C2 and C3 vehicles) and B* = 0,34 · g · GA (in the case of Class C1 vehicles). In this case, the maximum permissible thrust on the coupling shall be:
D* = 0,067 g · GA in the case of multi-axled drawbar towed vehicles;
and
D* = 0,10 g · GA in the case of rigid drawbar towed vehicles and centre-axle towed vehicles.
To check whether these conditions are complied with the following inequalities shall be applied:

10.3.1.1.In mechanical-transmission inertia braking systems:

10.3.1.2.In hydraulic-transmission inertia braking systems:
10.4.Check of control device travel
10.4.1.In control devices for multi-axled drawbar towed vehicles where the brake rod linkage depends on the position of the towing device, the control device travel s shall be longer than the effective (useful) control device travel s′, the difference being at least equivalent to the loss of travel so. The travel loss of so shall not exceed 10 per cent of the effective travel s′.
10.4.2.The effective (useful) travel of control device s′ shall be determined for single and multi-axle towed vehicles as follows:
10.4.2.1.
If the brake rod linkage is affected by the angular position of the towing device, then:
s′ = s – so
10.4.2.2.
If there is no loss of travel, then:
s′ = s
10.4.2.3.
In hydraulic braking systems:
s′ = s – s″
10.4.3.The following inequalities shall be applied to check whether control device travel is adequate;


10.5.Additional checks
10.5.1.In mechanical-transmission inertia braking systems a check shall be made to verify that the rod linkage by which the forces are transmitted from the control device to the brakes is correctly fitted.
10.5.2.In hydraulic-transmission inertia braking systems a check shall be made to verify that the travel of the master cylinder is not less than s/ih. A lower level shall not be permitted.
10.5.3.The general behaviour of the vehicle when braking shall be the subject of a road test carried out at different road speeds with different levels of brake effort and rates of application. Self-excited, undamped oscillations shall not be permitted.
11. General comments
The above requirements apply to the most usual embodiments of mechanical-transmission or hydraulic-transmission inertia braking systems where, in particular, all of the towed vehicle's wheels are equipped with the same type of brake and the same type of tyre. For checking less usual embodiments, the above requirements shall be adapted to the circumstances of the particular case.
Appendix 1 Explanatory diagrams













ANNEX IX Requirements applying to vehicles with hydrostatic drive and their braking devices and braking systems
1. Definitions
For the purposes of this Annex:
1.1.
‘hydrostatic braking system’ means a braking system (either as a service and/or secondary braking system) that only uses the braking power of the hydrostatic drive;
1.2.
‘combination hydrostatic braking system’ means a braking system utilising both, the hydrostatic and friction braking effect, where, however, the braking forces are generated by a predominant braking proportion generated by the hydrostatic drive. The minimum prescribed proportion of the friction brake on the braking effect is specified in point 6.3.1.1;
1.3.
‘combination friction braking system’ means a braking system utilising both, the friction and hydrostatic braking effect, where, however, the braking forces are generated by a predominant braking proportion generated by the friction brakes. The minimum prescribed proportion of the friction brake on the braking effect is specified in point 6.3.1.2;
1.4.
‘friction braking system’ means a braking system where the braking forces are generated only by the friction brakes without taking into account of the braking effect of the hydrostatic braking system;
1.5.
‘graduated hydrostatic braking’ means the hydrostatic braking through which the driver is able to increase or decrease the vehicle speed at any time by a progressive action on its control device.
1.6.
‘hydrostatic drive control device’ which means a device, such as a lever or pedal, used to vary the vehicle speed.
1.7.
‘service brake control device’ means the control device by whose operation the prescribed service braking performance is attained;
1.8.
‘inch device’ means the device that affects the speed of the vehicle independently of the hydrostatic drive control.
2. Scope
This Annex applies to vehicles with maximum design speed up to 40 km/h, equipped with a hydrostatic drive which cannot be disengaged during travel and is declared by the vehicle manufacturer to act as a braking system or braking device which may be either:
2.1.
a service braking system and a secondary braking system or one of those two systems.
A service braking system may be one of the braking systems mentioned below under the condition that the service braking performance as specified in point 6.3.1 is fulfilled:
2.1.1.
‘Hydrostatic braking system’,
2.1.2.
‘Combination hydrostatic braking system’,
2.1.3.
‘Combination friction braking system’,
2.1.4.
‘Friction braking system’;
or
2.2.
a part of the braking systems mentioned under 2.1.
3. Special purpose vehicles
For special purpose works, some vehicles are equipped with a hydrostatic drive used both to retard and to propel the vehicle. This type of drive can therefore be recognised as a braking system, whether alone or in combination with a friction brake.
4. Classification of vehicles
4.1. Class I
:
vehicles with a maximum design speed ≤ 12 km/h.
4.2. Class II
:
vehicles with a maximum design speed > 12 km/h and ≤ 30 km/h.
4.3. Class III
:
vehicles with a maximum design speed > 30 km/h and ≤ 40 km/h.
5. Requirements
5.1.General
5.1.1.The drive control device shall be constructed in such a way that accidental reversing is prevented during a journey on the road.
5.1.2.To facilitate vehicle recovery, a device is required disengaging the connection between engine and drive wheels.
It shall be impossible to operate this device from the driving position during the journey on the road.
If a tool is needed to operate this device, it shall be carried on the vehicle.
5.2.Design requirements for the braking systems.
5.2.1.Service braking system
5.2.1.1.It shall be possible to apply graduated braking action of the service braking system. The driver shall be able to achieve this braking action from his driving seat and retain control of the steering device on the tractor with at least one hand.
5.2.1.2.The performance of the service braking system required under the Regulation shall be obtained by the actuation of a single control device.
5.2.1.2.1.This requirement is also deemed to be satisfied when the foot is moved from the drive pedal to the brake pedal or when at the start of the braking sequence, the drive control device is released or moved to neutral position by hand or foot.
5.2.1.2.2.The control device of the service braking system shall be designed to return to the initial position automatically when released.
This does not apply to the hydrostatic section of the braking system when the release of the hydrostatic drive control device creates the braking effect.
5.2.1.3.Contrary to point 5.2.1.1, with vehicles of Class I and Class II, when braking with the service brake system another brake system may also be used (secondary or parking braking system) to bring the vehicle to a stop on a gradient in the event of a residual creep speed.
5.2.2.Secondary braking system
5.2.2.1.With regard to the secondary braking system the relevant requirements of point 2.1.2.2 of Annex I shall be fulfilled.
5.2.2.2.If, in the case of a hydrostatic drive, the vehicle cannot be stopped on a gradient, then it is permissible to operate the parking braking system to stop the vehicle from residual creep speed to standstill. For this purpose the parking braking system has to be designed such that it is possible for it to be actuated during driving.
5.2.3.Parking braking system
With regard to the parking braking system the requirements of point 2.1.2.3 of Annex I shall be fulfilled.
5.3.Characteristics of the braking systems
5.3.1.The set of braking systems with which a vehicle is equipped shall satisfy the requirements laid down for service, secondary and parking braking systems.
5.3.2.In the event of breakage of any component other than the brakes or the components referred to in point 2.2.1.2.7 of Annex I, or of any other failure of the service braking system the secondary braking system or that part of the service braking system which is not affected by the failure, shall be able to bring the vehicle to a halt in the conditions prescribed for secondary braking, in particular, when the secondary braking system and the service braking system have a common control device and a common transmission; for example, when the braking effect is dependent on the operation of the proper operation of the power transmission i.e. converter, hydraulic pumps, pressure pipes, hydraulic motors or comparable components.
5.3.3.The systems providing service, secondary and parking braking may have common components as long as they fulfil the conditions as specified in point 2.2.1.2 of Annex I.
5.3.4.The braking force distribution of the service brake system must be designed in such a way that during braking there is no significant moment around the vertical axis of the vehicle if the limit of adhesion between tyres and road on homogeneous road surfaces is not attained.
5.3.5.The braking force distribution of the service braking system shall be by design such that during braking with the service brake system on surfaces with different coefficients of friction of split-μ 0,2/0,8 a minimum deceleration can be achieved that is at least 55 % of the mean fully deceleration dm of the service braking system prescribed for the respective vehicle class (see point 6.3). This can be proven by calculations; in this case the rolling resistance shall not be taken into consideration.
5.3.6.By way of derogation from point 5.3.2, in the event of a failure in the pump control device of the hydrostatic drive, it shall be possible to stop the vehicle with the performance prescribed for the secondary braking system. However, under this failure condition an additional device may be actuated that can always be easily operated from the driving position (for example a device acting on the engine speed, including the engine shut off control).
5.3.7.In the case of an inch device, or other comparable device, which can be operated during driving, provisions shall be taken to ensure that all prescribed requirements of this Annex (especially the braking performance) are still complied with when this type of device is actuated.
5.3.8.Warning signals and warning devices
The relevant requirements of point 2.2.1.29 and point 2.2.1.12 of Annex I shall be fulfilled.
5.3.9.The energy storage devices (energy reservoirs) of power-driven vehicles shall be such that after eight full-stroke actuations of the service braking system control device the pressure remaining in the energy storage device(s) shall be not less than the pressure required to obtain the specified secondary braking performance.
5.3.10.The pneumatic/hydraulic auxiliary equipment shall be supplied with energy in such a way that during its operation, the prescribed deceleration values can be reached and that even in the event of damage to the source of energy the operation of the auxiliary equipment cannot cause the reserves of energy feeding the braking systems to fall below the level indicated in point 2.2.1.12 of Annex I.
5.3.11.Wear of the brakes
The relevant requirements of point 2.2.1.10 of Annex I shall be fulfilled.
5.3.12.In the case of a tractor equipped with a complex electronic vehicle control systems according to Annex X, the requirements of that Annex shall be applied and the operation of the system shall not be adversely affected by magnetic or electrical fields. This shall be demonstrated by compliance with the technical requirements laid down in accordance with the relevant provisions of Article 17(2)(g) and (5) of Regulation (EU) No 167/2013.
5.3.13.If a tractor with a hydrostatic drive is authorised to tow a category R2, R3, R4 or S2 vehicle shall satisfy the relevant requirements of point 2.1.4, 2.1.5, 2.2.1.16, 2.2.1.17 and 2.2.1.18 of Annex I.
5.3.14.Response time
Where a tractor is fitted with a service braking system which is totally or partially dependent on a source of energy other than the muscular effort of the driver, the requirements of point 3.3 of Annex II shall be satisfied for the non-hydrostatic part of the service braking system.
6. Braking tests
6.1.General
6.1.1.The relevant requirements of point 2.1 of Annex II shall be fulfilled.
6.1.2.During the brake test the drivability shall be assessed (e.g. tendency for lifting the rear axle due to the braking action of the service brakes).
6.1.2.1.Lift-off is not permitted for Class III vehicles.
6.1.2.2.Lifting-off of an axle is permissible for vehicles of Class I and Class II at a deceleration exceeding 4,5 m/s2; however, the driving stability shall be preserved.
Here, the braking effect of the hydrostatic drive has also to be taken into account.
6.2.Type-0 test
6.2.1.General
6.2.1.1.The brake shall be cold. A brake is deemed to be cold when the conditions as specified in point 2.2.1.1 of Annex II are met.
6.2.1.2.The test shall be conducted under the conditions as specified in point 2.2.1.3 of Annex II.
6.2.1.3.The road shall be level.
6.2.2.In the case of manually operated drive control device (Class I and Class II vehicles), the performance of the service brake shall be assessed by moving the drive lever to neutral just before operating the service brake in order to ensure not to brake against the hydrostatic system. In the case of Class III vehicles this sequence shall be automatic, using only the service brake control.
6.2.3.Service braking system
The limits prescribed for minimum performance, both for tests with the vehicle unladen and for tests with the vehicle laden, are those laid down in point 6.3 for each class of vehicle.
The service braking system has to meet the requirements in point 6.3.1.
When used as a service braking system,
6.2.3.1.a combination hydrostatic braking system shall also meet the requirements with regard to the minimum braking portion of friction brake(s) as specified in point 6.3.1.
6.2.3.2.a combination friction braking system shall also meet the requirements with regard to the minimum braking portion of friction brake(s) as specified in point 6.3.1.
The performance of the friction brake shall also be determined. In this type of test, the effect of the hydrostatic transmission shall be neutralised to assess the friction brake and rolling resistance.
If the hydrostatic brake cannot be disconnected for technical reasons, the proportion of the friction brake may be determined by another method, e.g.:
6.2.3.3.Successive brake tests are performed
6.2.3.3.1with the combination hydrostatic braking system with the friction brake(s) connected
6.2.3.3.2with the combination hydrostatic braking system with the friction brake(s) rendered inoperative (only 'hydrostatic braking')
Then this formula is used:
zF = zHy+F – zHy + R
zF
:
Mean fully developed deceleration of the friction braking system including rolling resistance
zHy
:
Mean fully developed deceleration related only to the braking effect of the hydrostatic braking system including rolling resistance
zHy+F
:
Mean fully developed deceleration of the combination hydrostatic braking system.
R
:
Rolling resistance = 0,02
6.2.4.Secondary braking system
6.2.4.1.The secondary braking effectiveness test shall be conducted by either simulating the actual failure conditions in the service braking system or by carrying out this test with a secondary braking system which is independent from the service braking system.
6.2.4.2.The system shall be tested with the appropriate control device.
The prescribed performance shall be obtained by applying to the control device a force not exceeding 600 N on a foot or 400 N on a hand operated control device. The control device shall be so placed that it can be easily and quickly applied by the driver.
6.2.4.3.The limits prescribed for minimum performance, both for tests with the vehicle unladen and for tests with the vehicle laden, are those laid down in point 6.3.2 for each class of vehicle.
6.3.Performance tests of service and secondary braking system (Type-0)
| Laden & Unladen | Class I | Class II | Class III | ||
|---|---|---|---|---|---|
| (v in km/h; s in m; dm in m/s2) | v | ≤ 12 | ≤ 30 | ≤ 40 | |
| 6.3.1. | Service braking system | s | ≤ 0,15v + v2/78 | ≤ 0,15v + v2/92 | ≤ 0,15v + v2/130 |
| dm | ≥ 3,0 | ≥ 3,55 | ≥ 5,0 | ||
| 6.3.1.1. | Minimum braking portion of friction brake(s) in a combination hydrostatic braking system | s | ≤ 0,15v + v2/26 | ≤ 0,15v + v2/40 | ≤ 0,15v + v2/40 |
| dm | ≥ 1,0 | ≥ 1,5 | ≥ 1,5 | ||
| 6.3.1.2. | Minimum braking portion of friction brake(s) within a combination friction braking system | s | ≤ 0,15v + v2/52 | ≤ 0,15v + v2/52 | ≤ 0,15v + v2/78 |
| dm | ≥ 2,0 | ≥ 2,0 | ≥ 3,0 | ||
| 6.3.2. | Secondary braking system | s | ≤ 0,15v + v2/40 | ≤ 0,15v + v2/40 | ≤ 0,15v + v2/57 |
| dm | ≥ 1,5 | ≥ 1,5 | ≥ 2,2 |
6.4.Brake test Type-I (fade)
6.4.1.The service brakes shall be tested in such a manner that, the vehicle being laden, the energy input to the brakes is equivalent to that recorded in the same period of time with a laden vehicle driven at a steady speed of 40 km/h on a 7 per cent down-gradient for a distance of 1,7 km.
6.4.2.Alternately, the test may be carried out on a level road, the tractor being drawn by a tractor; during the test, the force applied to the control device shall be adjusted so as to keep the resistance of the towed vehicle constant (7 per cent of the maximum total stationary axle load of the tested tractor). If the power available for hauling is insufficient, the test can be conducted at a lower speed but over a greater distance as shown in the table below:
| Speed [km/h] | Distance [metres] |
|---|---|
| 40 | 1 700 |
| 30 | 1 950 |
| 20 | 2 500 |
| 15 | 3 100 |
6.4.3.As an alternative to the procedure with continuous braking described in points 6.4.1 and 6.4.2., the test procedure described in point 2.3.1 of Annex II with repeated braking may also be used.
6.4.4.Hot performance
At the end of the Type-I test the hot performance of the service braking system shall be measured in the same conditions (and in particular at a constant control force no greater than the mean force actually used) as for the Type-0 test (the temperature conditions may be different).
6.4.4.1.The hot braking performance of the service braking system shall not be below the limits given in the table of following point 6.4.4.2.
6.4.4.2.Minimum prescribed hot performance (Type-I test)
| Service braking system | Hot performance as % of the prescribed value | Hot performance as % of the value recorded during Type-0 test |
|---|---|---|
| Hydrostatic braking system | 90 | 90 |
| Combination hydrostatic braking system | 90 | 80 |
| Combination friction braking system | 80 | 60 |
| Friction braking system | 75 | 60 |
6.4.5.The type-I Test can be omitted provided that the following two conditions are met:
6.4.5.1.
At least 60 % of the total braking forces during the Type-0 test of the service braking system (see point 6.2.3) is produced by the braking with the hydrostatic drive.
6.4.5.2.
The manufacturer can prove that overheating of the brakes in case of permanent operation is prevented.
6.5.Parking braking system
6.5.1.With regard to the parking braking system the requirements of point 3.1.3 of Annex II shall be fulfilled.
6.5.2.To check compliance with the requirement specified in point 2.2.1.2.4 of Annex I, a Type-0 test shall be carried out with the laden vehicle at an initial test speed of v ≥ 0,8 vmax. The mean fully developed deceleration on application of the control device of the parking braking system and the deceleration immediately before the vehicle stops shall not be less than 1,5 m/s2. The force exerted on the braking control device shall not exceed the specified values.
In the case of a manually operated drive control (Class I and Class II vehicles), the performance of the parking brake system in motion shall be assessed by moving the drive control to neutral just before operating the parking braking system in order to ensure not to brake against the hydrostatic system. In the case of Class III vehicles this sequence shall be automatic, using only the service brake control.
ANNEX X Requirements applying to the safety aspects of complex electronic vehicle control systems
1. General
This Annex lays down the requirements for type-approval testing, fault strategy and verification with respect to the safety aspects of complex electronic vehicle control systems related to the braking of agricultural and forestry vehicles.
2. Requirements
All complex electronic vehicle control systems shall comply with the provisions of Annex 18 to UNECE Regulation No 13, as referenced in the following table:
| UNECE Regulation No | Subject | Series of amendments | OJ Reference |
|---|---|---|---|
| 13 | Approval of vehicles of categories M, N and O with regard to braking | Supplement 5 to the 10 series of amendments 11 series of amendments |
ANNEX XI Requirements and test procedures applying to anti-lock braking systems and to vehicles fitted with them
1. Definitions
For the purposes of this Annex:
1.1.
‘integrated endurance braking system’ means an endurance braking system whose control device is integrated with that of the service braking system in such a way that both endurance and service braking systems are applied simultaneously or suitably phased by operation of the combined control device;
1.2.
‘sensor’ means a component designed to identify and transmit to the controller the conditions of rotation of the wheel(s) or the dynamic conditions of the vehicle;
1.3.
‘controller’ means a component designed to evaluate the data transmitted by the sensor(s) and to transmit a signal to the modulator;
1.4.
‘modulator’ means a component designed to vary the braking force(s) in accordance with the signal received from the controller;
1.5.
‘indirectly controlled wheel’ means a wheel whose braking force is modulated according to data provided by the sensor(s) of other wheel(s);
1.6.
‘full cycling’ means that the anti-lock braking system is repeatedly modulating the brake force to prevent the directly controlled wheels from locking and excluding brake applications where modulation only occurs once during the stop;
1.7.
‘full force’ means the maximum force laid down in the braking tests and performance of braking systems according to this Regulation.
For the purposes of directly and indirectly controlled wheels, anti-lock braking systems with ‘select-high’ control are deemed to include both directly and indirectly controlled wheels; in systems with ‘select-low’ control, all sensed wheels are deemed to be directly controlled wheels.
2. General
2.1.This Annex lays down the required braking performance for agricultural vehicles fitted with anti-lock braking systems.
The maximum design speed for which such requirements are provided is meant, throughout this Annex, to be in the forward direction of the vehicle travel, unless otherwise explicitly mentioned.
2.2.The anti-lock braking systems known at present comprise a sensor or sensors, a controller or controllers and a modulator or modulators. Any device of a different design which may be introduced in the future, or where an anti-lock braking function is integrated into another system, shall be deemed to be anti-lock braking systems within the meaning of this Annex if they provide performances equal to those prescribed by this Annex.
2.3.Deviations from the prescribed test procedures are permitted in case that testing conditions cannot be complied with due to a too low maximum design speed of the tractor. In such a case the equivalence of the prescribed performances has to be demonstrated with the method of assessment and results being appended to the type approval report.
3. Types of anti-lock braking systems
3.1.A tractor is deemed to be equipped with an anti-lock braking system if one of the following systems is fitted:
3.1.1.
Category 1 anti-lock braking system:
A vehicle equipped with a category 1 anti-lock braking system shall meet all the relevant requirements of this Annex.
3.1.2.
Category 2 anti-lock braking system:
A vehicle equipped with a category 2 anti-lock braking system shall meet all the relevant requirements of this Annex, except those of point 5.3.5.
3.1.3.
Category 3 anti-lock braking system:
A vehicle equipped with a category 3 anti-lock braking system shall meet all the relevant requirements of this Annex except those of points 5.3.4 and 5.3.5 On such vehicles, any individual axle (or bogie) which does not include at least one directly controlled wheel shall fulfil the conditions of adhesion utilisation and the wheel-locking sequence of Appendix 1 to Annex II, with regard to the braking rate and the load respectively. Those requirements may be checked on high- and low-adhesion coefficient road surfaces (about 0,8 and 0,3 maximum) by modulating the service braking control force.
3.2.A towed vehicle shall be deemed to be equipped with an anti-lock braking system when at least two wheels on opposite sides of the vehicle are directly controlled and all remaining wheels are either directly or indirectly controlled by the anti-lock braking system. In the case of drawbar towed vehicles, at least two wheels on one front axle and two wheels on one rear axle shall be directly controlled with each of these axles having at least one independent modulator and all remaining wheels are either directly or indirectly controlled. In addition, the anti-lock equipped towed vehicle shall meet one of the following conditions:
3.2.1.
Category A anti-lock braking system:
A towed vehicle equipped with a category A anti-lock braking system shall meet all the relevant requirements of this Annex.
3.2.2.
Category B anti-lock braking system:
A towed vehicle equipped with a category B anti-lock braking system shall meet all the relevant requirements of this Annex, except point 6.3.2.
4. General requirements
4.1.Failures within the electric control transmission of the anti-lock braking system that affects the system with respect to the functional and performance requirements in this Annex, shall be signalled to the driver by a specific optical warning signal. The yellow warning signal specified in point 2.2.1.29.1.2 of Annex I shall be used for this purpose.
Until uniform test procedures have been agreed, the manufacturer shall provide the Technical Service with an analysis of potential failures within the control transmission and their effects. That information shall be subject to discussion and agreement between the Technical Service and the vehicle manufacturer.
4.1.1.Sensor anomalies, which cannot be detected under static conditions, shall be detected not later than when the vehicle speed exceeds 10 km/h. However, to prevent erroneous fault indication when a sensor is not generating a speed output, due to non-rotation of a wheel, verification may be delayed but detected not later than when the vehicle speed exceeds 15 km/h. The warning signal may light up again while the vehicle is stationary, provided that it is extinguished before the vehicle speed reaches 10 km/h or 15 km/h, as appropriate, when no defect is present.
4.1.2.When the anti-lock braking system is energised with the vehicle stationary, electrically controlled pneumatic modulator valve(s) shall cycle at least once.
4.2.Tractors equipped with an anti-lock braking system and authorised to tow a towed vehicle equipped with such a system shall be fitted with a separate optical warning signal for the anti-lock braking system of the towed vehicle, meeting the requirements of point 4.1. The separate warning signals specified in point 2.2.1.29.2 of Annex I shall be used for this purpose, activated via pin 5 of the electrical connector conforming to ISO 7638:2003. The ISO 7638:2003 connector may be used for 5 pin or 7 pin applications, as appropriate.
4.2.1.The warning signal shall not light up when a towed vehicle without an anti-lock braking system is coupled or when no towed vehicle is coupled. This function shall be automatic.
4.3.In the event of a failure as described in point 4.1, the following requirements shall apply:
Tractors: The residual braking performance in the event of a failure of part of the transmission of the service braking system shall be 1,3 m/s2. That requirement shall not be construed as a departure from the requirements concerning secondary braking.
Towed vehicles: The residual braking performance shall be of at least 30 per cent of the prescribed performance for the service braking system of the relevant towed vehicle.
4.4.The operation of the system shall not be adversely affected by magnetic or electrical fields. That requirement shall be demonstrated by compliance with the technical requirements laid down on the basis of Article 17(2)(g) and (5) of Regulation (EU) No 167/2013.
4.5.A manual device shall not be provided to disconnect or change the control mode of the anti-lock braking system, except on tractors of category T or C. Where a device is fitted to tractors of category T or C, the following conditions shall be met:
4.5.1.
An optical warning signal shall inform the driver that the anti-lock braking system has been disconnected or the control mode changed; the anti-lock failure warning signal specified in point 2.2.1.29.1.2 of Annex I may be used for this purpose.
The warning signal shall be constant or flashing.
4.5.2.
The anti-lock braking system shall automatically be reconnected/returned to on-road mode when the ignition (start) device is again set to the 'on' (run) position or the vehicle speed exceeds 30 km/h.
4.5.3.
The vehicle user's handbook provided by the manufacturer should warn the driver of the consequences of manual disconnection or mode change of the anti-lock braking system.
4.5.4.
The device referred to in point 4.5 may, in conjunction with the tractor, disconnect/change the control mode of the anti-lock braking system of the towed vehicle. A separate device for the towed vehicle alone is not permitted.
4.5.5.
Devices changing the control mode of the anti-lock braking system are not subject to point 4.5 if in the changed control mode condition all requirements for the category of anti-lock braking system with which the vehicle is equipped are fulfilled. However, in such a case, points 4.5.1, 4.5.2, and 4.5.3 shall be met.
4.6.In the case of vehicles which are equipped with an anti-lock braking system and with an integrated endurance braking system, the anti-lock braking system shall act at least on the service brakes of the endurance braking system's controlled axle and on the endurance braking system itself, and shall fulfil the relevant requirements of this Annex.
4.7.In the case of towed vehicles with pneumatic braking systems, full cycling of the anti-lock braking system is only assured when the pressure available at any brake actuator of a directly controlled wheel is more than 100 kPa above the maximum cycling pressure throughout a given test. The supply pressure available may not be increased above 800 kPa.
In the case of towed vehicles with hydraulic braking systems, full cycling of the anti-lock braking system is only assured when the pressure available at any brake actuator of a directly controlled wheel is more than 1 750 kPa above the maximum cycling pressure throughout a given test. The available energy level provided to the anti-lock braking system may not be increased above 14 200 kPa.
5. Special provisions concerning tractors
5.1.Energy consumption
Tractors equipped with anti-lock braking systems shall maintain their performance when the service braking control device is fully applied for long periods. Compliance with the requirement shall be verified by means of the procedure referred to in points 5.1.1, 5.2.3, 5.2.4, 5.2.5, 5.3, 6.1.1, 6.1.3, 6.1.4, 6.3:
5.1.1.Test procedure
5.1.1.1.The initial energy level in the energy storage device(s) shall be that specified by the manufacturer. This level shall be at least such as to ensure the efficiency prescribed for service braking when the vehicle is laden. The energy storage device(s) for pneumatic auxiliary equipment shall be isolated.
5.1.1.2.From an initial speed of not less than 50 km/h (or vmax, whichever is lower), on a surface with a coefficient of adhesion of 0,3 or less, the brakes of the laden vehicle shall be fully applied for a time t, during which time the energy consumed by the indirectly controlled wheels shall be taken into consideration and all directly controlled wheels shall remain under control of the anti-lock braking system throughout that time.
Until such test surfaces become generally available, tyres at the limit of wear, and higher values up to 0,4 may be used at the discretion of the technical service. The actual value obtained and the type of tyres and surface shall be recorded.
5.1.1.3.The vehicle's engine shall be then stopped or the supply to the energy storage device(s) cut off.
5.1.1.4.The service braking control device shall be then fully actuated four times in succession with the vehicle stationary.
5.1.1.5.When the control device is applied for the fifth time, it shall be possible to brake the vehicle with at least the performance prescribed for secondary braking of the laden vehicle.
5.1.1.6.During the tests, in the case of a vehicle authorised to tow a vehicle equipped with a compressed-air braking system, the supply line shall be blocked off and an energy storage device of 0,5 litre capacity shall be connected to the control line (in accordance with point 1.2.2.3 of Annex IV, section A). When the brakes are applied for the fifth time, as provided in point 5.1.1.5 of this Annex, the energy level supplied to the control line shall not be below half the level obtained at a full application starting with the initial energy level.
5.1.2.Additional requirements
5.1.2.1.The coefficient of adhesion of the road surface is measured with the vehicle in question, by the method described in point 1.1 of Appendix 2.
5.1.2.2.The braking test shall be conducted with the engine disconnected and idling, and with the vehicle laden.
5.1.2.3.The braking time t shall be 15 seconds.
5.1.2.4.If the time t cannot be completed in a single braking phase, further phases may be used, up to a maximum of four in all.
5.1.2.5.If the test is conducted in several phases, no fresh energy shall be supplied between the phases of the test. From the second phase, the energy consumption corresponding to the initial brake application may be taken into account, by subtracting one full brake application from the four full applications prescribed in points 5.1.1.4, 5.1.1.5, 5.1.1.6 and 5.1.2.6 for each of the second, third and fourth phases used in the test procedure prescribed in point 5.1.1 as applicable.
5.1.2.6.The performance prescribed in point 5.1.1.5 shall be deemed to be satisfied if, at the end of the fourth application, with the vehicle stationary, the energy level in the storage device(s) is at or above that required for secondary braking with the laden vehicle.
5.2.Utilisation of adhesion
5.2.1.The utilisation of adhesion by the anti-lock braking system takes into account the actual increase in braking distance beyond the theoretical minimum. The anti-lock braking system shall be deemed to be satisfactory when the condition
ε ≥ 0,75
is satisfied, where ε represents the adhesion utilised, as described in point 1.2 of Appendix 2.
5.2.2.The adhesion utilisation (ε) shall be measured on road surfaces with a coefficient of adhesion of 0,3 or less, and of about 0,8 (dry road), with an initial speed of 50 km/h or vmax, whichever is the lower. To eliminate the effects of differential brake temperatures it is recommended that zAL (see Appendix 1) be determined prior to the determination of k.
Until such test surfaces become generally available, tyres at the limit of wear, and higher values up to 0,4 may be used at the discretion of the technical service. The actual value obtained and the type of tyres and surface shall be recorded.
5.2.3.The test procedure to determine the coefficient of adhesion (k) and the formulae for calculation of the adhesion utilisation (ε) shall be those laid down in Appendix 2.
5.2.4.The utilisation of adhesion by the anti-lock braking system shall be checked on complete vehicles equipped with anti-lock braking systems of categories 1 or 2. In the case of vehicles equipped with category 3 anti-lock braking systems, only the axle(s) with at least one directly controlled wheel shall satisfy this requirement.
5.2.5.The condition ε ≥0,75 shall be checked with the vehicle laden and unladen. The laden test on the high-adhesion surface may be omitted if the prescribed force on the control device does not achieve full cycling of the anti-lock braking system. For the unladen test, the control force may be increased up to 1 000 N if no cycling is achieved with its full force value. A higher force value than the one of the full force may be used if required to activate the anti-lock braking system. If 1 000 N is insufficient to make the system cycle, then this test may be omitted. For air braking systems, the air pressure may not be increased above the cut-out pressure for the purpose of this test.
5.3.Additional checks
The following additional checks shall be carried out with the engine disconnected, with the vehicle laden and unladen:
5.3.1.
The wheels directly controlled by an anti-lock braking system shall not lock when the full force is suddenly applied on the control device, on the road surfaces specified in point 5.2.2, at an initial speed of 40 km/h and at a high initial speed as indicated in the table below:
| Condition | Maximum test speed |
|---|---|
| High adhesion surface | 0,8 vmax ≤ 80 km/h |
| Low adhesion surface | 0,8 vmax ≤ 70 km/h |
5.3.2.
When an axle passes from a high-adhesion surface (kH) to low-adhesion surface (kL) where kH ≥ 0,5 and kH/kL ≥ 2, with the full force applied on the control device, the directly controlled wheels shall not lock. The running speed and the instant of applying the brakes shall be so calculated that, with the anti-lock braking system fully cycling on the high-adhesion surface, the passage from one surface to the other is made at high and at low speed, under the conditions laid down in point 5.3.1 above.
5.3.3.
When a vehicle passes from a low-adhesion surface (kL) to a high-adhesion surface (kH) where kH ≥ 0,5 and kH/kL ≥ 2, with the full force applied on the control device, the deceleration of the vehicle shall rise to the appropriate high value within a reasonable time and the vehicle shall not deviate from its initial course. The running speed and the instant of applying the brakes shall be so calculated that, with the anti-lock braking system fully cycling on the low-adhesion surface, the passage from one surface to the other occurs at approximately 50 km/h or 0,8 vmax, whichever is the lower.
5.3.4.
In the case of vehicles equipped with anti-lock braking systems of categories 1 and 2, when the right and left wheels of the vehicle are situated on surfaces with differing coefficients of adhesion (kH and kL) where kH ≥ 0,5 and kH/kL ≥ 2 the directly controlled wheels shall not lock when the full force is suddenly applied on the control device at a speed of 50 km/h or 0,8 vmax, whichever is the lower.
5.3.5.
Furthermore, laden vehicles equipped with anti-lock braking systems of category 1 shall, under the conditions of point 5.3.4, satisfy the braking rate prescribed in Appendix 3.
5.3.6.
However, in the tests provided for in points 5.3.1, 5.3.2, 5.3.3, 5.3.4 and 5.3.5, brief periods of wheel-locking are allowed. Furthermore, wheel-locking is permitted when the vehicle speed is less than 15 km/h; likewise, locking of indirectly controlled wheels is permitted at any speed, but stability and steerability shall not be affected.
5.3.7.
During the tests provided for in points 5.3.4 and 5.3.5, steering correction is permitted if the angular rotation of the steering control device is within 120° during the initial 2 seconds and not more than 240° in all. Furthermore, at the beginning of these tests the longitudinal median plane of the vehicle shall pass over the boundary between the high- and low-adhesion surfaces and during these tests no part of the (outer) tyres shall cross this boundary.
5.3.8.
The following notes are taken into account:
5.3.8.1.
kH and kL are measured as laid down in Appendix 2 to this Annex.
5.3.8.2.
The purpose of the tests in the following points 5.3.1, 5.3.2, 5.3.3 and 5.3.4 is to check that the directly controlled wheels do not lock and that the vehicle remains stable. In these tests a higher force value than the one of the full force may be used if required to activate the anti-lock braking system.
5.3.8.3.
With regard to points 5.3.1 and 5.3.2 it is not necessary, therefore, to make complete stops and bring the vehicle to a complete halt on the low-adhesion surface.
6. Special provisions concerning towed vehicles
6.1.Energy consumption
Towed vehicles equipped with anti-lock braking systems shall be so designed that, even after the service braking control device has been fully applied for some time, the vehicle retains sufficient energy to bring it to a halt within a reasonable distance.
6.1.1.Compliance with the above requirement shall be checked by the procedure specified below, with the vehicle unladen, on a straight and level road with a surface having a good coefficient of adhesion, and with the brakes adjusted as closely as possible and with the brake load sensing device (if fitted) held in the 'laden' position throughout the test.
If the coefficient of adhesion of the test track is too high, preventing the anti-lock braking system from cycling then the test may be carried out on a surface with a lower coefficient of adhesion.
6.1.2.In the case of compressed-air braking systems, the initial energy level in the energy storage device(s) shall be equivalent to a pressure of 800 kPa at the coupling head of the towed vehicle's supply line.
6.1.3.With an initial vehicle speed of at least 30 km/h, the brakes shall be fully applied for a time t = 15 s, during which time the energy consumed by the indirectly controlled wheels shall be taken into consideration and all directly controlled wheels shall remain under control of the anti-lock braking system. During this test, the supply to the energy storage device(s) shall be cut off. If the time t = 15 s cannot be completed in a single braking phase, further phases may be used. During these phases, no fresh energy shall be supplied to the energy storage device(s) and, as from the second phase, the additional energy consumption for filling the actuators is to be taken into account, e.g. by the following test procedure. The pressure in the reservoir(s) when starting the first phase is to be that stated in point 6.1.2. At the beginning of the following phase(s), the pressure in the reservoir(s) after application of the brakes shall be not less than the pressure in the reservoir(s) at the end of the preceding phase. At the subsequent phase(s), the only time to be taken into account is from the point at which the pressure in the reservoir(s) is equal to that at the end of the preceding phase.
6.1.4.At the end of the braking, with the vehicle stationary, the service braking control device shall be fully actuated four times. During the fifth application, the pressure in the operating circuits shall be sufficient to provide a total braking force at the periphery of the wheels equal to not less than 22,5 % of the maximum stationary wheel load and without causing an automatic application of any braking system not being under the control of the anti-lock braking system.
6.2.Utilisation of adhesion
6.2.1.Towed vehicles equipped with an anti-lock braking system shall be deemed acceptable when the condition ε ≥ 0,75 is satisfied, where ε represents the adhesion utilised, as defined in point 2 of Appendix 2. This condition shall be verified with the vehicle unladen, on a straight and level road with a surface having a good coefficient of adhesion.
If the coefficient of adhesion of the test track is too high, preventing the anti-lock braking system from cycling then the test may be carried out on a surface with a lower coefficient of adhesion.
In the case of trailers fitted with a brake load sensing device the pressure setting may be increased to ensure full cycling.
6.2.2.To eliminate the effects of differential brake temperatures, it is recommended that zRAL be determined prior to the determination of kR.
6.3.Additional checks
6.3.1.At speeds exceeding 15 km/h, the wheels directly controlled by an anti-lock braking system shall not lock when the full force is suddenly applied on the control device of the tractor. This shall be checked, under the conditions prescribed in point 6.2, at initial speeds of 40 km/h and 60 km/h.
6.3.2.The provisions of this point shall only apply to towed vehicles equipped with an anti-lock braking system of category A. When the right and left wheels are situated on surfaces which produce differing maximum braking rates (zRALH and zRALL), where


the directly controlled wheels shall not lock when the force is suddenly applied on the control device of the tractor at a speed of 50 km/h. The ratio zRALH/zRALL may be ascertained by the procedure in point 2 of Appendix 2 or by calculating the ratio zRALH/zRALL. Under this condition, the unladen vehicle shall satisfy the prescribed braking rate in Appendix 3.
In the case of towed vehicle equipped with a brake load sensing device, the pressure setting of the device may be increased to ensure full cycling.
6.3.3.At vehicle speeds ≥15 km/h, the directly controlled wheels are permitted to lock for brief periods, but at speeds < 15 km/h, any locking is permissible. Indirectly controlled wheels are permitted to lock at any speed. In all cases, stability shall not be affected.
Appendix 1 Symbols
The following symbols are used in Appendices 2, 3 and 4:
| a FMnd and FMd in case of two-axled power-driven vehicles: these symbols may be simplified to corresponding Fi-symbols. | |
| Symbol | Notes |
|---|---|
| E | wheelbase |
| ER | distance between coupling point and centre of axle(s) of rigid drawbar towed vehicle (or distance between coupling point and centre of axle(s) of centre-axle towed vehicle) |
| ε | the adhesion utilised by the vehicle: quotient of the maximum braking rate with the anti-lock braking system operative (zAL) and the coefficient of adhesion (k) |
| εi | the ε-value measured on axle i (in the case of a tractor with a category 3 anti-lock braking system) |
| εΗ | the ε-value on the high-friction surface |
| εL | the ε-value on the low-friction surface |
| F | force [N] |
| FbR | braking force of the towed vehicle with the anti-lock braking system inoperative |
| FbRmax | maximum value of FbR |
| FbRmaxi | value of FbRmax with only axle i of the towed vehicle braked |
| FbRAL | braking force of the towed vehicle with the anti-lock braking system operative |
| FCnd | total normal reaction of road surface on the un-braked and non-driven axles of the vehicle combination under static conditions |
| FCd | total normal reaction of road surface on the un-braked and driven axles of the vehicle combination under static conditions |
| Fdyn | normal reaction of road under dynamic conditions with the anti-lock braking system operative |
| Fidyn | Fdyn on axle i in case of tractors or drawbar towed vehicle |
| Fi | normal reaction of road surface on axle i under static conditions |
| FM | total normal static reaction of road surface on all wheels of the tractor |
| FMnd a | total normal static reaction of road surface on the un-braked and non-driven axles of the tractor |
| FMd | total normal static reaction of road surface on the un-braked and driven axles of the power-driven vehicle |
| FR | total normal static reaction of road surface on all wheels of towed vehicle |
| FRdyn | total normal dynamic reaction of road surface on the axle(s) of rigid drawbar towed vehicle or centre-axle towed vehicle |
| FwM | 0,01 FMnd + 0,015 FMd |
| g | acceleration due to gravity (9,81 m/s2) |
| h | height of centre of gravity specified by the manufacturer and agreed by the technical service conducting the approval test |
| hD | height of drawbar (hinge point on towed vehicle) |
| hK | height of fifth wheel coupling (king pin) |
| hR | height of centre of gravity of the towed vehicle |
| k | coefficient of adhesion between tyre and road |
| kf | k-factor of one front axle |
| kH | k-value determined on the high-friction surface |
| ki | k-value determined on axle i for a vehicle with a category 3 anti-lock braking system |
| kL | k-value determined on the low-friction surface |
| klock | value of adhesion for 100 % slip |
| kM | k-factor of the tractor |
| kpeak | maximum value of the curve ‘adhesion versus slip’ |
| kr | k-factor of one rear axle |
| kR | k-factor of the towed vehicle |
| P | mass of individual vehicle [kg] |
| R | ratio of kpeak to klock |
| t | time interval [s] |
| tm | mean value of t |
| tmin | minimum value of t |
| z | braking rate [m/s2] |
| zAL | braking rate z of the vehicle with the anti-lock braking system operative |
| zC | braking rate z of the vehicle combination, with the towed vehicle only braked and the anti-lock braking system inoperative |
| zCAL | braking rate z of the vehicle combination, with the towed vehicle only braked and the anti-lock braking system operative |
| zCmax | maximum value of zC |
| zCmaxi | maximum value of zC, with only axle i of the towed vehicle braked |
| zm | mean braking rate |
| zmax | maximum value of z |
| zMALS | zAL of the tractor on a ‘split surface’ |
| zR | braking rate z of the towed vehicle with the anti-lock braking system inoperative |
| zRAL | zAL of the towed vehicle obtained by braking all the axles, the tractor un-braked and its engine disconnected |
| zRALH | zRAL on the surface with the high coefficient of adhesion |
| zRALL | zRAL on the surface with the low coefficient of adhesion |
| zRALS | zRAL on the split surface |
| zRH | zR on the surface with the high coefficient of adhesion |
| zRL | zR on the surface with the low coefficient of adhesion |
| zRHmax | maximum value of zRH |
| zRLmax | maximum value of zRL |
| zRmax | maximum value of zR |
Appendix 2 Utilisation of adhesion
1. Method of measurement for tractors
1.1.Determination of the coefficient of adhesion (k)
1.1.1.The coefficient of adhesion (k) shall be determined as the quotient of the maximum braking forces without locking the wheels and the corresponding dynamic load on the axle being braked.
1.1.2.The brakes shall be applied only on one axle of the vehicle under test, at an initial speed of 50 km/h. The braking forces shall be distributed between the wheels of the axle to reach maximum performance. The anti-lock braking system shall be disconnected, or inoperative, between 40 km/h and 20 km/h.
1.1.3.A number of tests at increments of line pressure shall be carried out to determine the maximum braking rate of the vehicle (zmax). During each test, a constant input force shall be maintained and the braking rate shall be determined by reference to the time (t) taken for the speed to reduce from 40 km/h to 20 km/h using the formula:

zmax is the maximum value of z in m/s2,
t is in seconds.
1.1.3.1.Wheel-lock may occur below 20 km/h.
1.1.3.2.Starting from the minimum measured value of t, called tmin, then select three values of t comprised within tmin and 1,05 tmin and calculate their arithmetical mean value tm, then calculate

If it is demonstrated that for practical reasons the three values determined above cannot be obtained, then the minimum time tmin may be utilised. However, the requirements of point 1.3 still apply.
1.1.4.The braking forces shall be calculated from the measured braking rate and the rolling resistance of the un-braked axle(s) which is equal to 0,015 and 0,010 of the static axle load for a driven axle and a non-driven axle, respectively.
1.1.5.The dynamic load on the axle shall be calculated from the braking rate, static axle load, wheelbase and centre of gravity height.
1.1.6.The value of k shall be rounded to three decimal places.
1.1.7.Then, the test shall be repeated for the other axles(s) as defined in points 1.1.1 to 1.1.6 (for exemptions, see points 1.4 and 1.5).
1.1.8.For example, in the case of a two-axle rear-wheel drive vehicle, with the front axle being braked, the coefficient of adhesion (k) is given by:

1.1.9.One coefficient shall be determined for the front axle kf and one for the rear axle kr.
1.2.Determination of the adhesion utilised (ε)
1.2.1.The adhesion utilised (ε) is defined as the quotient of the maximum braking rate with the anti-lock braking system operative (zAL) and the coefficient of adhesion kM, i.e.

1.2.2.From an initial vehicle speed of 55 km/h, or vmax whichever is lower, the maximum value for the braking rate (zAL) shall be measured with full cycling of the anti-lock braking system. This value for zAL shall be based on the average value of three tests, as previously described in point 1.1.3, using the time taken for the speed to reduce from 45 km/h to 15 km/h, according to the following formula:

1.2.3.The coefficient of adhesion kM shall be determined by weighting with the dynamic axle loads:

Where:


1.2.4.The value of ε shall be rounded to two decimal places.
1.2.5.In the case of a vehicle equipped with an anti-lock braking system of category 1 or 2, the value of zAL is based on the whole vehicle, with the anti-lock braking system in operation, and the adhesion utilised (ε) shall be given by the same formula quoted in point 1.2.1.
1.2.6.In the case of a vehicle equipped with an anti-lock braking system of category 3, the value of zAL shall be measured on each axle which has at least one directly controlled wheel.
Example: for a two-axle vehicle with an anti-lock braking system acting only on the rear axle (2), the adhesion utilised (ε) is given by:

This calculation shall be made for each axle having at least one directly controlled wheel.
1.3.If ε > 1,00, the measurements of coefficients of adhesion shall be repeated. A tolerance of 10 % is acceptable.
1.4.For tractors equipped with three axles, any axles that are interconnected by either suspension components and thereby react to weight transfer under braking or driveline may be disregarded in establishing a k value for the vehicle.
Until a uniform test procedure is agreed, vehicles with more than three axles and special vehicles shall be subject to consultation with the technical service.
1.5.For tractors with a wheel base less than 3,80 m and with h/E > 0,25, the determination of the coefficient of adhesion for the rear axle shall be omitted
1.5.1.In that case, the adhesion utilised (ε) is defined as the quotient of the maximum braking rate with the anti-lock braking system operative (zAL) and the coefficient of adhesion (kf), i. e.

2. Method of measurement for towed vehicles
2.1.General
2.1.1.The coefficient of adhesion (k) shall be determined as the quotient of the maximum braking forces without locking the wheels and the corresponding dynamic load on the axle being braked.
2.1.2.The brakes shall be applied on only one axle of the towed vehicle under test, at an initial speed of 50 km/h. The braking forces shall be distributed between the wheels of the axle to reach maximum performance. The anti-lock braking system shall be disconnected or inoperative between 40 km/h and 20 km/h.
2.1.3.A number of tests at increments of line pressure shall be carried out to determine the maximum braking rate of the vehicle combination (zCmax) with the towed vehicle only braked. During each test, a constant input force shall be maintained and the braking rate shall be determined by reference to the time taken (t) for the speed to reduce from 40 km/h to 20 km/h using the formula:

2.1.3.1.Wheel-lock may occur below 20 km/h.
2.1.3.2.Starting from the minimum measured value of t, called tmin, then select three values of t comprised within tmin and 1,05 tmin and calculate their arithmetical mean value tm.
then calculate:

If it is demonstrated that for practical reasons the three values determined above cannot be obtained, then the minimum time tmin may be utilised.
2.1.4.The adhesion utilised (ε) shall be calculated by means of the formula:

The k value shall be determined according to point 2.2.3 for drawbar towed vehicles or point 2.3.1 for rigid drawbar towed vehicles and centre-axle towed vehicles, respectively.
2.1.5.If ε > 1,00 the measurements of coefficients of adhesion shall be repeated. A tolerance of 10 % is accepted.
2.1.6.The maximum braking rate (zRAL) shall be measured with full cycling of the anti-lock braking system and the tractor unbraked, based on the average value of three tests, as in point 2.1.3.
2.2.Drawbar towed vehicles
2.2.1.The measurement of k (with the anti-lock braking system being disconnected, or inoperative, between 40 km/h and 20 km/h) shall be performed for the front and rear axles.
For one front axle i:



For one rear axle i:



2.2.2.The values of kf and kr shall be rounded to three decimal places.
2.2.3.The coefficient of adhesion kR shall be determined proportionally according to the dynamic axle loads.

2.2.4.Measurement of zRAL (with the anti-lock braking system operative)

zRAL shall be determined on a surface with a high coefficient of adhesion and, for vehicles with a category A anti-lock braking system, also on a surface with a low coefficient of adhesion.
2.3.Rigid drawbar towed vehicles and centre-axle towed vehicles
2.3.1.The measurement of k (with the anti-lock braking system being disconnected, or inoperative, between 40 km/h and 20 km/h) shall be carried out with wheels fitted only on one axle, the wheels of the other axle(s) are removed.



2.3.2.The measurement of zRAL (with the anti-lock braking system operative) shall be carried out with all wheels fitted.



zRAL shall be determined on a surface with a high coefficient of adhesion and, for vehicles with a category A anti-lock braking system, also on a surface with a low coefficient of adhesion.
Appendix 3 Performance on differing adhesion surfaces
1. Tractors
1.1.The prescribed braking rate referred to in point 6.3.5 of this Annex may be calculated by reference to the measured coefficient of adhesion of the two surfaces on which this test is carried out.
These two surfaces shall satisfy the conditions prescribed in point 6.3.4 of this Annex.
1.2.The coefficient of adhesion (kH and kL) of the high- and low-adhesion surfaces, respectively, shall be determined in accordance with the provisions in point 1.1 of Appendix 2.
1.3.The braking rate (zMALS) for laden tractors shall be:


2. Towed vehicles
2.1.The braking rate referred to in point 6.3.2 of this Annex may be calculated by reference to the measured braking rates zRALH and zRALL on the two surfaces on which the tests are carried out with the anti-lock braking system operative. These two surfaces shall satisfy the conditions prescribed in point 6.3.2 of this Annex.
2.2.The braking rate zRALS shall be:


If εΗ > 0,95 use εΗ = 0,95.
Appendix 4 Method of selection of the low-adhesion surface
1.Details of the coefficient of adhesion of the surface selected, as determined in point 5.1.1.2 of this Annex, shall be given to the technical service.
1.1.These data shall include a curve of the coefficient of adhesion versus slip (from 0 % to 100 % slip) for a speed of approximately 40 km/h.
Until a uniform test procedure is established for the determination of the adhesion curve for vehicles with a maximum mass exceeding 3,5 tonnes, the curve established for passenger cars may be used. In this case, for vehicles with a maximum mass exceeding 3.5 tonnes, the ratio kpeak to klock shall be established using a value of kpeak as defined in Appendix 2. With the consent of the technical service, the coefficient of adhesion described in this item may be determined by another method provided that the equivalence of the values of kpeak and klock are demonstrated.
1.1.1.The maximum value of the curve will represent kpeak and the value at 100 % slip will represent klock.
1.1.2.The ratio R shall be determined as the quotient of the kpeak and klock.

1.1.3.The value of R shall be rounded to one decimal place.
1.1.4.The surface to be used shall have a ratio R between 1,0 and 2,0.
Until such test surfaces become generally available, a ratio R up to 2,5 is acceptable, subject to discussion with the technical service.
2.Prior to the tests, the technical service shall ensure that the selected surface meets the specified requirements and shall be informed of the test method to determine R, the type of vehicle (tractor, etc.) and the axle load and tyres (different loads and different tyres have to be tested and the results shown to the technical service which will decide if they are representative for the vehicle to be approved).
2.1.The value of R shall be mentioned in the test report.
The calibration of the surface has to be carried out at least once a year with a representative vehicle to verify the stability of R.
ANNEX XII Requirements applying to EBS of vehicles with compressed-air braking systems or of vehicles with data communication via pin 6 and 7 of ISO 7638 connector and to vehicles fitted with such EBS
1. Definitions
For the purposes of this Annex:
1.1.
‘point-to-point’ means a topology of a communication network with only two units. Each unit has an integrated termination resistor for the communication line;
1.2.
‘braking signal’ means a logic signal indicating brake activation.
2. General requirements
2.1.The electric control line shall conform to ISO 11992-1 and 11992-2:2003 including Amd.1:2007 and be a point-to-point type using the seven pin connector according to ISO 7638-1 or 7638-2:2003. The data contacts of the ISO 7638 connector shall be used to transfer information exclusively for braking (including ABS) and running gear (steering, tyres and suspension) functions as specified in ISO 11992-2:2003 including Amd.1:2007. The braking functions have priority and shall be maintained in the normal and failed modes. The transmission of running gear information shall not delay braking functions. The power supply, provided by the ISO 7638 connector, shall be used exclusively for braking and running gear functions and that required for the transfer of towed vehicle related information not transmitted via the electric control line. However, in all cases the provisions of point 5.2.1 shall apply. The power supply for all other functions shall use other measures.
2.2.The support of messages defined within ISO 11992-2:2003 including Amd.1:2007 is specified in Appendix 1 to this Annex for the tractor and towed vehicle as appropriate.
2.3.The functional compatibility of tractors and towed vehicles equipped with electric control lines shall be assessed at the time of type approval by checking that the relevant provisions of ISO 11992:2003, including ISO 11992-2:2003 and its Amd.1:2007 parts 1 and 2, are fulfilled. Appendix 2 to this Annex provides an example of tests that may be used to perform this assessment.
2.4.When a tractor is equipped with an electric control line and electrically connected to a towed vehicle equipped with an electric control line, a continuous failure (> 40 ms) within the electric control line shall be detected in the tractor and shall be signalled to the driver by the yellow warning signal specified in point 2.2.1.29.1.2 of Annex I, when such vehicles are connected via the electric control line.
3. Special requirements for the connections between tractors and towed vehicles for compressed-air braking systems
3.1.The electric control line of the tractor shall provide information as to whether the requirements of point 2.2.1.29.1.2 of Annex I can be satisfied by the electric control line, without assistance from the pneumatic control line. It shall also provide information as to whether it is equipped according to point 2.1.4.1.2 of Annex I with two control lines or according to point 2.1.4.1.3 of Annex I with only an electric control line.
3.2.A tractor equipped according to point 2.1.4.1.3 of Annex I shall recognise that the coupling of a towed vehicle equipped according to point 2.1.4.1.1 of Annex I is not compatible. When such vehicles are electrically connected via the electric control line of the tractor, the driver shall be warned by the red optical warning signal specified in point 2.2.1.29.1.1 of Annex I and when the system is energised, the brakes on the tractor shall be automatically applied. This brake application shall provide at least the prescribed parking braking performance required by points 3.1.3.1 and 3.1.3.2 of Annex II respectively.
3.3.In the case of a tractor equipped with two control lines as described in point 2.1.4.1.2 of Annex I, when electrically connected to a towed vehicle which is also equipped with two control lines, all of the following conditions shall be fulfilled:
3.3.1.
both signals shall be present at the coupling head and the towed vehicle shall use the electric control signal unless this signal is deemed to have failed. In this case the towed vehicle shall automatically switch to the pneumatic control line;
3.3.2.
each vehicle shall conform to the relevant provisions of Appendix 1 of Annex II for both electric and pneumatic control lines;
3.3.3.
when the electric control signal has exceeded the equivalent of 100 kPa for more than 1 second, the towed vehicle shall verify that a pneumatic signal is present; should no pneumatic signal be present, the driver shall be warned from the towed vehicle by the separate yellow warning signal specified in point 2.1.4.1.2 of Annex I.
3.4.A towed vehicle may be equipped as described in point 2.1.4.1.3 of Annex I, provided that it can only be operated in conjunction with a tractor with an electric control line which satisfies the requirements of point 2.2.1.17.1 of Annex I. In any other case, the towed vehicle, when electrically connected, shall automatically apply the brakes or remain braked. The driver shall be warned by the separate yellow warning signal specified in point 2.2.1.29.2 of Annex I.
3.5.If the operation of the parking braking system on the tractor also operates a braking system on the towed vehicle, as permitted by point 2.1.2.3 of Annex I, then the following additional requirements shall be met:
3.5.1.
When the tractor is equipped according to point 2.1.4.1.1 of Annex I, the actuation of the parking braking system of the tractor shall actuate a braking system on the towed vehicle via the pneumatic control line.
3.5.2.
When the tractor is equipped according to point 2.1.4.1.2 of Annex I, the actuation of the parking braking system on the tractor shall actuate a braking system on the towed vehicle as prescribed in point 3.5.1 In addition, the actuation of the parking braking system may also actuate a braking system on the towed vehicle via the electric control line.
3.5.3.
When the tractor is equipped according to point 2.1.4.1.3, of Annex I or, if it satisfies the requirements of point 2.2.1.17.1 of Annex I without assistance from the pneumatic control line, point 2.1.4.1.2 of Annex I, the actuation of the parking braking system on the tractor shall actuate a braking system on the towed vehicle via the electric control line. When the electrical energy for the braking equipment of the tractor is switched off, the braking of the towed vehicle shall be effected by evacuation of the supply line (in addition, the pneumatic control line may remain pressurised); the supply line may only remain evacuated until the electrical energy for the braking equipment of the tractor is restored and simultaneously the braking of the towed vehicle via the electric control line is restored.
4. Special additional requirements for service braking systems with electric control transmission
4.1.Tractors
4.1.1.With the parking braking system released, the service braking system shall be able to generate a static total braking force at least equivalent to that required by the prescribed Type-0 test, even when the ignition/start switch has been switched off and/or the key has been removed. In the case of tractors authorised to tow vehicles of category R3b or R4b, such vehicles shall provide a full control signal for the service braking system of the towed vehicle. It should be understood that sufficient energy is available in the energy transmission of the service braking system.
4.1.2.In the case of a single temporary failure (< 40 ms) within the electric control transmission, excluding its energy supply, (e.g. non-transmitted signal or data error) there shall be no distinguishable effect on the service braking performance.
4.1.3.A failure within the electric control transmission, not including its energy reserve, that affects the function and performance of systems addressed in this Regulation shall be indicated to the driver by the red or yellow warning signal specified in points 2.2.1.29.1.1 and 2.2.1.29.1.2 of Annex I, respectively, as appropriate. When the prescribed service braking performance can no longer be achieved (warning signal), failures resulting from a loss of electrical continuity (e.g. breakage, disconnection) shall be signalled to the driver as soon as they occur, and the prescribed residual braking performance shall be fulfilled by operating the service braking control in accordance with point 3.1.4 of Annex II.
The manufacturer shall provide the Technical Service with an analysis of potential failures within the control transmission and their effects. This information shall be subject to discussion and agreement between the Technical Service and the vehicle manufacturer.
These requirements shall not be construed as a departure from the requirements concerning secondary braking.
4.1.4.A tractor electrically connected to a towed vehicle via an electric control line, shall provide a clear warning to the driver whenever the towed vehicle provides the failure information that the stored energy in any part of the service braking system on the towed vehicle falls below the warning level, as specified in point 5.2.4. A similar warning shall also be provided when a continuous failure (> 40 ms) within the electric control transmission of the towed vehicle, excluding its energy reserve, precludes achievement of the prescribed service braking performance of the towed vehicle, as specified in point 4.2.3. The warning signal specified in point 2.2.1.29.2.1 of Annex I shall be used for this purpose.
4.1.5.In the event of a failure of the energy source of the electric control transmission, starting from the nominal value of the energy level, the full control range of the service braking system shall be guaranteed after twenty consecutive full stroke actuations of the service braking control device. During the test, the braking control device shall be fully applied for 20 seconds and released for 5 seconds on each actuation. It should be understood that during the above test, sufficient energy is available in the energy transmission to ensure full actuation of the service braking system. This requirement shall not be construed as a departure from the requirements of Annex IV.
4.1.6.When the battery voltage falls below a value nominated by the manufacturer at which the prescribed service braking performance can no longer be guaranteed and/or which precludes at least two independent service braking circuits from each achieving the prescribed secondary or residual braking performance, the warning signal specified in point 2.2.1.29.1.1 of Annex I shall be activated. After the warning signal has been activated, it shall be possible to apply the service braking control device and obtain at least the performances prescribed for residual and secondary braking in the case of tractor with maximum design speed exceeding 60 km/h or the performance prescribed for secondary braking in the case of tractor with maximum design speed not exceeding 60 km/h. It should be understood that sufficient energy is available in the energy transmission of the service braking system. This requirement shall not be construed as a departure from the requirement concerning secondary braking.
4.1.7.If auxiliary equipment is supplied with energy from the same reserve as the electric control transmission, it shall be ensured that, with the engine running at a speed not greater than 80 % of the maximum power speed, the supply of energy is sufficient to fulfil the prescribed deceleration values by either provision of an energy supply which is able to prevent discharge of this reserve when all auxiliary equipment is functioning or by automatically switching off pre-selected parts of the auxiliary equipment at a voltage above the critical level referred to in point 4.1.6 such that further discharge of this reserve is prevented. Compliance may be demonstrated by calculation or by a practical test. For vehicles authorised to tow a vehicle of category R3b or R4b the energy consumption of the towed vehicle shall be taken into account by a load of 400 W. This point does not apply to vehicles where the prescribed deceleration values can be reached without the use of electrical energy.
4.1.8.If the auxiliary equipment is supplied with energy from the electric control transmission, the following requirements shall be fulfilled.
4.1.8.1.In the event of a failure in the energy source, whilst the vehicle is in motion, the energy in the reservoir shall be sufficient to actuate the brakes when the control device is applied.
4.1.8.2.In the event of a failure in the energy source, whilst the vehicle is stationary and the parking braking system applied, the energy in the reservoir shall be sufficient to actuate the lights even when the brakes are applied.
4.1.9.In the case of a failure in the electric control transmission of the service braking system of a tractor equipped with an electric control line according to point 2.1.4.1.2 or 2.1.4.1.3 of Annex I, the full actuation of the brakes of the towed vehicle shall remain ensured.
4.1.10.In the case of a failure in the electric control transmission of a towed vehicle, electrically connected via an electric control line only, according to point 2.1.4.1.3 of Annex I, braking of the towed vehicle shall be ensured according to point 2.2.1.17.3.1 of Annex I. This shall be the case whenever the towed vehicle provides the ‘supply line braking request’ signal via the data communication part of the electric control line or in the event of the continuous absence of this data communication. This point shall not apply to tractors which cannot be operated with towed vehicles connected via an electric control line only, as described in point 3.4.
4.2.Trailers
4.2.1.In the case of a single temporary failure (< 40 ms) within the electric control transmission, excluding its energy supply, (e.g. non-transmitted signal or data error) there shall be no distinguishable effect on the service braking performance.
4.2.2.In the case of a failure within the electric control transmission (e.g. breakage, disconnection), of at least 30 % of the prescribed performance for the service braking system of the relevant towed vehicle shall be maintained.
Until uniform test procedures have been agreed, the manufacturer shall provide the Technical Service with an analysis of potential failures within the control transmission, and their effects. This information shall be subject to discussion and agreement between the Technical Service and the vehicle manufacturer.
For towed vehicles, electrically connected via an electric control line only, according to point 2.1.4.1.3 of Annex I, and fulfilling 2.2.1.17.3.2 of Annex I with the performance prescribed in point 3.2.3 of Annex II, it is sufficient that the provisions of point 4.1.10 are invoked, when a braking performance of at least 30 % of the prescribed performance for the service braking system of the towed vehicle can no longer be ensured, by either providing the ‘supply line braking request’ signal via the data communication part of the electric control line or by the continuous absence of this data communication.
4.2.3.A failure within the electric control transmission of the towed vehicle that affects the function and performance of systems addressed by this Regulation and failures of energy supply available from the ISO 7638:2003 connector shall be indicated to the driver by the separate warning signal specified in point 2.2.1.29.2 of Annex I via pin 5 of the electrical connector conforming to ISO 7638:2003. In addition, towed vehicles equipped with an electric control line, when electrically connected to a tractor with an electric control line, shall provide the failure information for activation of the warning signal specified in point 2.2.1.29.2.1 of Annex I via the data communication part of the electric control line, when the prescribed service braking performance of the towed vehicle can no longer be ensured.
However, in the case of any failure of the energy supply available from the ISO 7638:2003 connector, the indication of the yellow warning signal via pin 5 of the electrical connector conforming to ISO 7638:2003 is sufficient under the condition that the full braking force is still available.
5. Additional requirements
5.1.Tractors
5.1.1.Generation of a braking signal to illuminate stop lamps
5.1.1.1.Activation of the service braking system by the driver shall generate a signal that will be used to illuminate the stop lamps.
5.1.1.2.Requirements for vehicles that utilise electronic signalling to control initial application of the service braking system and equipped with an endurance braking system:
| Deceleration by the endurance braking system | |
|---|---|
| ≤ 1,3 m/sec2 | > 1,3 m/sec2 |
| May generate the signal | Shall generate the signal |
5.1.1.3.In the case of vehicles equipped with a braking system of a specification different to that laid down in point 5.1.1.2, the operation of the endurance braking system may generate the signal irrespective of the deceleration produced.
5.1.1.4.The signal shall not be generated when deceleration is produced by the natural braking effect of the engine alone.
5.1.1.5.Activation of the service braking system by automatically commanded braking shall generate the signal mentioned above. However, when the deceleration generated is less than 0,7 m/s2, the signal may be suppressed
At the time of type approval, compliance with this requirement shall be confirmed by the vehicle manufacturer.
5.1.1.6.Activation of part of the service braking system by selective braking shall not generate the signal mentioned above.
During a selective braking event, the function may change to automatically commanded braking.
5.1.1.7.In the case of vehicles equipped with an electric control line the signal shall be generated by the tractor when a message ‘illuminate stop lamps’ is received via the electric control line from the towed vehicle.
5.2.Towed vehicles
5.2.1.Whenever power supplied by the ISO 7638:2003 connector is used for the functions referred to in point 2.1, the braking system shall have priority and be protected from an overload external to the braking system. This protection shall be a function of the braking system.
5.2.2.In the case of a failure in one of the control lines connecting two vehicles equipped according to point 2.1.4.1.2 of Annex I the towed vehicle shall use the control line not affected by the failure to ensure, automatically, the braking performance prescribed for the towed vehicle in point 3.2.1 of Annex II.
5.2.3.When the supply voltage to the towed vehicle falls below a value nominated by the manufacturer at which the prescribed service braking performance can no longer be guaranteed, the separate yellow warning signal specified in point 2.2.1.29.2 of Annex I shall be activated via pin 5 of the ISO 7638:2003 connector. In addition, towed vehicles equipped with an electrical control line, when electrically connected to a tractor with an electric control line, shall provide the failure information for actuation of the warning signal specified in point 2.2.1.29.2.1 of Annex I via the data communication part of the electric control line.
5.2.4.When the stored energy in any part of the service braking system of a towed vehicle equipped with an electric control line and electrically connected to a tractor with an electronic control line, falls to the value determined in accordance with point 5.2.4.1, a warning shall be provided to the driver of the tractor. The warning shall be provided by activation of the red signal specified in point 2.2.1.29.2.1 of Annex I and the towed vehicle shall provide the failure information via the data communication part of the electric control line. The separate yellow warning signal specified in point 2.2.1.29.2 of Annex I shall also be activated via pin 5 of the electrical connector conforming to ISO 7638:2003, to indicate to the driver that the low-energy situation is on the towed vehicle.
5.2.4.1.The low energy value referred to in point 5.2.4 shall be that at which, without re-charging of the energy reservoir and irrespective of the load condition of the towed vehicle, it is not possible to apply the service braking control device a fifth time after four full-stroke actuations and obtain at least 50 % of the prescribed performance of the service braking system of the relevant towed vehicle.
5.2.5.Activation of the service braking system
5.2.5.1.In the case of towed vehicles equipped with an electric control line the message ‘illuminate stop lamps’ shall be transmitted by the towed vehicle via the electric control line when the towed vehicle braking system is activated during ‘automatically commanded braking’ initiated by the towed vehicle. However, when the retardation generated is less than 0,7 m/s2, the signal may be suppressed.
At the time of type approval, compliance with this requirement shall be confirmed by the vehicle manufacturer.
5.2.5.2.In the case of towed vehicles equipped with an electric control line the message ‘illuminate stop lamps’ shall not be transmitted by the towed vehicle via the electrical control line during selective braking initiated by the towed vehicle.
During a selective braking event, the function may change to automatically commanded braking.
6. Suppression of automatic braking
In the case of towed vehicles equipped with an electric control line and electrically connected to a tractor with an electric control line the automatic braking action specified in point 2.2.1.17.2.2 of Annex I may be suppressed as long as the pressure in the compressed air reservoirs of the towed vehicle is sufficient to ensure the braking performance specified in point 3.2.3 of Annex II.
Appendix 1 Compatibility between tractors and towed vehicles with respect to ISO 11992 data communications
1.General
1.1.The requirements of this Appendix shall only apply to tractors and towed vehicles equipped with an electric control line.
1.2.The ISO 7638 connector provides a power supply for the braking system or anti-lock braking system of the towed vehicle. In the case of vehicles equipped with an electric control line this connector also provides a data communication interface via Pins 6 and 7 as in point 2.1 of this Annex.
1.3.This Appendix lays down requirements applicable to the tractor and towed vehicle with respect to the support of messages defined within ISO 11992-2:2003 including Amd.1:2007.
2.The parameters defined within ISO 11992-2:2003 including Amd.1:2007 that are transmitted by the electric control line shall be supported as follows:
2.1.
The following functions and associated messages are those specified within this Regulation that shall be supported by the tractor or towed vehicle as appropriate:
2.1.1.
Messages transmitted from the tractor to the towed vehicle:
| Function/Parameter | ISO 11992-2:2003Reference | Reference in this Regulation |
|---|---|---|
| Service/secondary brake demand value | EBS11 Byte 3-4 | Appendix 1 to Annex II, point 3.1.3.2. |
| Two electrical circuits brake demand value | EBS12 Byte 3 Bit 1-2 | Annex XII, point 3.1. |
| Pneumatic control line | EBS12 Byte 3 Bit 5-6 | Annex XII, point 3.1. |
2.1.2.
Messages transmitted from the towed vehicle to the tractor:
| Function/Parameter | ISO 11992-2:2003Reference | Reference in this Regulation |
|---|---|---|
| Vehicle electrical supply sufficient/insufficient | EBS22 Byte 2 Bit 1-2 | Annex XII, point 5.2.3. |
| Warning signal request | EBS22 Byte 2 Bit 3-4 | Annex XII, point 4.2.3., 5.2.4. and 5.2.3. |
| Supply line braking request | EBS22 Byte 4 Bit 3-4 | Annex XII, point 4.2.2. |
| Stop lamps request | EBS22 Byte 4 Bit 5-6 | Annex XII, point 5.2.5.1. |
| Vehicle pneumatic supply sufficient/insufficient | EBS23 Byte 1 Bit 7-8 | Annex XII, point 5.2.4. |
2.2.
When the towed vehicle transmits the following message, the tractor shall provide a warning to the driver:
| Function/Parameter | ISO 11992-2:2003Reference | Driver Warning Required |
|---|---|---|
| Warning signal request | EBS22 Byte 2 Bit 3-4 | point 2.2.1.29.2.1 of Annex I |
2.3.
The following messages defined in ISO 11992-2:2003 including Amd.1:2007 shall be supported by the tractor or towed vehicle:
2.3.1.
Messages transmitted from the tractor to the towed vehicle:
No messages currently defined.
2.3.2.
Messages transmitted from the towed vehicle to the tractor:
| Function/Parameter | ISO 11992-2:2003Reference |
|---|---|
| Vehicle service brake active/passive | EBS22 Byte 1, Bit 5-6 |
| Braking via electric control line supported | EBS22 Byte 4, Bit 7-8 |
| Geometric data index | EBS24 Byte 1 |
| Geometric data index content | EBS24 Byte 2 |
2.4.
The following messages shall be supported by the tractor or towed vehicle as appropriate when the vehicle is installed with a function associated with that parameter:
2.4.1.
Messages transmitted from the tractor to the towed vehicle:
| Function/Parameter | ISO 11992-2:2003Reference |
|---|---|
| Vehicle type | EBS11 Byte 2, Bit 3-4 |
| VDC (Vehicle Dynamic Control) Active/passive | EBS11 Byte 2, Bit 5-6 |
| Brake demand value for front or left side of vehicle | EBS11 Byte 7 |
| Brake demand value for rear or right side of vehicle | EBS11 Byte 8 |
| ROP (Roll Over Protection) system enabled/disabled | EBS12 Byte 1, Bit 3-4 |
| YC (Yaw Control) system enabled/disabled | EBS12 Byte 1, Bit 5-6 |
| Enable/disable towed vehicle ROP (Roll Over Protection) system | EBS12 Byte 2, Bit 1-2 |
| Enable/disable towed vehicle YC (Yaw Control) system | EBS12 Byte 2, Bit 3-4 |
| Traction help request | RGE11 Byte 1, Bit 7-8 |
| Lift axle 1 — position request | RGE11 Byte 2, Bit 1-2 |
| Lift axle 2 — position request | RGE11 Byte 2, Bit 3-4 |
| Steering axle locking request | RGE11 Byte 2, Bit 5-6 |
| Seconds | TD11 Byte 1 |
| Minutes | TD11 Byte 2 |
| Hours | TD11 Byte 3 |
| Months | TD11 Byte 4 |
| Day | TD11 Byte 5 |
| Year | TD11 Byte 6 |
| Local minute offset | TD11 Byte 7 |
| Local hour offset | TD11 Byte 8 |
2.4.2.
Messages transmitted from the towed vehicle to the tractor:
| Function/Parameter | ISO 11992-2:2003Reference |
|---|---|
| Support of side or axle wise brake force distribution | EBS21 Byte 2, Bit 3-4 |
| Wheel based vehicle speed | EBS21 Byte 3-4 |
| Lateral acceleration | EBS21 Byte 8 |
| Vehicle ABS active/passive | EBS22 Byte 1, Bit 1-2 |
| Amber warning signal request | EBS22 Byte 2, Bit 5-6 |
| Vehicle type | EBS22 Byte 3, Bit 5-6 |
| Loading ramp approach assistance | EBS22 Byte 4, Bit 1-2 |
| Axle load sum | EBS22 Byte 5-6 |
| Tyre pressure sufficient/insufficient | EBS23 Byte 1, Bit 1-2 |
| Brake lining sufficient/insufficient | EBS23 Byte 1, Bit 3-4 |
| Brake temperature status | EBS23 Byte 1, Bit 5-6 |
| Tyre/wheel identification (pressure) | EBS23 Byte 2 |
| Tyre/wheel identification (lining) | EBS23 Byte 3 |
| Tyre/wheel identification (temperature) | EBS23 Byte 4 |
| Tyre pressure (actual tyre pressure) | EBS23 Byte 5 |
| Brake lining | EBS23 Byte 6 |
| Brake temperature | EBS23 Byte 7 |
| Brake cylinder pressure first axle left wheel | EBS25 Byte 1 |
| Brake cylinder pressure first axle right wheel | EBS25 Byte 2 |
| Brake cylinder pressure second axle left wheel | EBS25 Byte 3 |
| Brake cylinder pressure second axle right wheel | EBS25 Byte 4 |
| Brake cylinder pressure third axle left wheel | EBS25 Byte 5 |
| Brake cylinder pressure third axle right wheel | EBS25 Byte 6 |
| ROP (Roll Over Protection) system enabled/disabled | EBS25 Byte 7, Bit 1-2 |
| YC (Yaw Control) system enabled/disabled | EBS25 Byte 7, Bit 3-4 |
| Traction help | RGE21 Byte 1, Bit 5-6 |
| Lift axle 1 position | RGE21 Byte 2, Bit 1-2 |
| Lift axle 2 position | RGE21 Byte 2, Bit 3-4 |
| Steering axle locking | RGE21 Byte 2, Bit 5-6 |
| Tyre wheel identification | RGE23 Byte 1 |
| Tyre temperature | RGE23 Byte 2-3 |
| Air leakage detection (Tyre) | RGE23 Byte 4-5 |
| Tyre pressure threshold detection | RGE23 Byte 6, Bit 1-3 |
2.5.
The support of all other messages defined within ISO 11992-2:2003 including Amd.1:2007 is optional for the tractor and towed vehicle.
Appendix 2 Test procedure to assess the functional compatibility of vehicles equipped with electric control lines
1. General
1.1.This Appendix lays down a procedure that may be used by the Technical Service to check tractors and towed vehicles equipped with an electric control line against the functional and performance requirements referred to in point 2.2. of Annex XII.
1.2.The references to ISO 7638 within this Appendix apply to ISO 7638-1:2003 for 24V applications and ISO 7638-2:2003 for 12V applications.
2. Tractors
2.1.ISO 11992 towed vehicle simulator
The simulator shall:
2.1.1.
Have a connector meeting ISO 7638:2003 (7 pin) to connect to the vehicle under test. Pins 6 and 7 of the connector shall be used to transmit and receive messages complying with ISO 11992:2003 including ISO 11992-2:2003 and its Amd.1:2007;
2.1.2.
Be capable of receiving all of the messages transmitted by the motor vehicle to be type approved and be capable of transmitting all towed vehicle messages defined within ISO 11992-2:2003 and its Amd.1:2007;
2.1.3.
Provide a direct or indirect readout of messages, with the parameters in the data field shown in the correct order relative to time; and
2.1.4.
Include a facility to measure coupling head response time in accordance with point 2.6 of Annex III.
2.2.Checking procedure
2.2.1.Confirm that the manufacturer's/supplier's information document demonstrates compliance with the provisions of ISO 11992 with respect to the physical layer, data link layer and application layer.
2.2.2.Check the following, with the simulator connected to the motor vehicle via the ISO 7638 interface and whilst all towed vehicle messages relevant to the interface are being transmitted:
2.2.2.1.Control line signalling:
2.2.2.1.1.
The parameters defined in EBS 12 byte 3 of ISO 11992-2:2003 and its Amd.1:2007 shall be checked against the specification of the vehicle as follows:
| a This specification of vehicle is prohibited following point 2.1.4.1.3 of Annex I. | ||
| Control Line Signalling | EBS 12 Byte 3 | |
|---|---|---|
| Bits 1-2 | Bits 5-6 | |
| Service braking demand generated from one electrical circuit | 00b | |
| Service braking demand generated from two electrical circuits | 01b | |
| Vehicle is not equipped with a pneumatic control linea | 00b | |
| Vehicle is equipped with a pneumatic control line | 01b | |
2.2.2.2.Service/Secondary brake demand:
2.2.2.2.1
The parameters defined in EBS 11 of ISO 11992-2:2003 and its Amd.1:2007 shall be checked as follows:
| a Optional on tractors with electric and pneumatic control lines when the pneumatic control line fulfils the relevant requirements for secondary braking. | ||
| Test condition | Byte reference | Electrical control line signal value |
|---|---|---|
| Service brake pedal and secondary brake control released | 3 - 4 | 0 |
| Service brake pedal fully applied | 3 - 4 | 33280d to 43520d (650 to 850 kPa) |
| Secondary brake fully applieda | 3 - 4 | 33280d to 43520d (650 to 850 kPa) |
2.2.2.3.Failure warning:
2.2.2.3.1.
Simulate a permanent failure in the communication line to pin 6 of the ISO 7638 connector and check that the yellow warning signal specified in point 2.2.1.29.1.2 of Annex I is displayed.
2.2.2.3.2.
Simulate a permanent failure in the communication line to pin 7 of the ISO 7638 connector and check that the yellow warning signal specified in point 2.2.1.29.1.2 of Annex I is displayed.
2.2.2.3.3.
Simulate message EBS 22, byte 2 with bits 3 - 4 set to 01b and check that the warning signal specified in point 2.2.1.29.1.1 of Annex I is displayed.
2.2.2.4.Supply line braking request:
For power-driven vehicles which can be operated with towed vehicles connected via an electric control line only:
Only the electric control line shall be connected.
Simulate message EBS 22, byte 4 with bits 3 - 4 set to 01b and check that when the service brake, secondary brake or parking braking system is fully actuated the pressure in the supply line falls to 150 kPa within the following two seconds.
Simulate a continuous absence of data communication and check that when the service brake, secondary brake or parking braking system is fully actuated the pressure in the supply line falls to 150 kPa within the following two seconds.
2.2.2.5.Response time:
2.2.2.5.1.
Check that, with no faults present, the control line response requirements laid down in point 2.6. of Annex III are met.
2.2.2.6.Illumination of stop lamps
Simulate message EBS 22 byte 4 bits 5 to 6 set to 00 and check that the stop lamps are not illuminated.
Simulate message EBS 22 byte 4 bits 5 to 6 set to 01 and check that the stop lamps are illuminated.
2.2.3.Additional checks
2.2.3.1.At the discretion of the Technical Service the checking procedures laid down in points 2.2.1 and 2.2.2 may be repeated with the non-braking functions relevant to the interface in different states or switched off.
2.2.3.2.Point 2.4.1. of Appendix 1 defines additional messages that shall under specific circumstances be supported by the tractor. Additional checks may be carried out to verify the status of supported messages to ensure the requirements of point 2.3 are fulfilled.
3. Towed vehicles
3.1.ISO 11992 tractor simulator
The simulator shall:
3.1.1.
Have a connector meeting ISO 7638:2003 (7 pin) to connect to the vehicle under test. Pins 6 and 7 of the connector shall be used to transmit and receive messages complying with ISO 11992:2003 including ISO 11992-2:2003 and its Amd.1:2007;
3.1.2.
Have a failure warning display and an electrical power supply for the towed vehicle;
3.1.3.
Shall be capable of receiving all of the messages transmitted by the towed vehicle to be type approved and be capable of transmitting all motor vehicle messages defined within ISO 11992-2:2003 and its Amd.1:2007.
3.1.4.
Provide a direct or indirect readout of messages with the parameters in the data field shown in the correct order relative to time; and
3.1.5.
Include a facility to measure brake system response time in accordance with point 4.5.2 of Annex III.
3.2.Checking procedure
3.2.1.Confirm that the manufacturer's or supplier's Information Document, demonstrates compliance with the provisions of ISO 11992:2003 including ISO 11992-2:2003 and its Amd.1:2007 with respect to the physical layer, data link layer and application layer.
3.2.2.Check the following, with the simulator connected to the towed vehicle via the ISO 7638 interface and whilst all tractor messages relevant to the interface are being transmitted:
3.2.2.1.Service brake system function:
3.2.2.1.1.The towed vehicle response to the parameters defined in EBS 11 of ISO 11992-2:2003 and its Amd.1:2007 shall be checked as follows:
The pressure in the supply line at the start of each test shall be ≥ 700 kPa and the vehicle shall be laden (the loading condition may be simulated for the purpose of this check).
3.2.2.1.1.1.For towed vehicles equipped with pneumatic and electric control lines:
Both control lines shall be connected;
Both control lines shall be signalled simultaneously;
The simulator shall transmit message byte 3, bits 5-6;
Of EBS 12 set to 01b to indicate to the towed vehicle that a pneumatic control line should be connected.
Parameters to be checked:
| Message transmitted by the simulator | Pressure at the brake chambers | |
|---|---|---|
| Byte reference | Digital demand value | |
| 3-4 | 0 | 0 kPa |
| 3-4 | 33280d (650 kPa) | As defined in the vehicle manufacturer's brake calculation |
3.2.2.1.1.2.Towed vehicles equipped with pneumatic and electric control lines or an electric control line only:
Only the electric control line shall be connected
The simulator shall transmit the following messages:
Byte 3, bits 5-6 of EBS 12 set to 00b to indicate to the towed vehicle that a pneumatic control line is not available, and byte 3, bits 1-2 of EBS 12 set to 01b to indicate to the towed vehicle that the electric control line signal is generated from two electric circuits.
Parameters to be checked:
| Message transmitted by the simulator | Pressure at the brake chambers | |
|---|---|---|
| Byte reference | Digital demand value | |
| 3-4 | 0 | 0 kPa |
| 3-4 | 33280d (650 kPa) | As defined in the vehicle manufacturer's brake calculation |
3.2.2.1.2.For towed vehicles equipped with only an electric control line, the response to messages defined in EBS 12 of ISO 11992-2:2003 and its Amd.1:2007 shall be checked as follows:
The pneumatic supply line at the start of each test shall be ≥ 700 kPa.
The electric control line shall be connected to the simulator.
The simulator shall transmit the following messages:
Byte 3, bits 5-6 of EBS 12 set to 01b to indicate to the towed vehicle that a pneumatic control line is available.
Byte 3-4 of EBS 11 shall be set to 0 (no service brake demand)
The response to the following messages shall be checked:
| EBS 12, Byte 3, Bit 1-2 | Pressure in the brake chambers or reaction of the towed vehicle |
|---|---|
| 01b | 0 kPa (service brake released) |
| 00b | The towed vehicle is automatically braked to demonstrate that the combination is not compatible. A signal should also be transmitted via Pin 5 of the ISO 7638:2003 connector (yellow warning). |
3.2.2.1.3.For towed vehicles connected with only an electrical control line, the response of the towed vehicle to a failure in the electric control transmission of the towed vehicle which results in a reduction in braking performance to at least 30 % of the prescribed value shall be checked by the following procedure:
The pneumatic supply line at the start of each test shall be ≥ 700 kPa.
The electric control line shall be connected to the simulator.
Byte 3, bits 5-6 of EBS 12 set to 00b to indicate to the towed vehicle that a pneumatic control line is not available.
Byte 3, bits 1-2 of EBS 12 set to 01b to indicate to the towed vehicle that the electric control line signal is generated from two independent circuits.
The following shall be checked:
| Test condition | Braking system response |
|---|---|
| With no faults present in the towed vehicle braking system | Check that the braking system is communicating with the simulator and that Byte 4, bits 3-4 of EBS 22 is set to 00b. |
| Introduce a failure in the electric control transmission of the towed vehicle braking system that prevents at least 30 per cent of the prescribed braking performance from being maintained | Check that Byte 4, bits 3-4 of EBS 22 is set to 01b or The data communications to the simulator has been terminated |
3.2.2.2.Failure warning
3.2.2.2.1.Check that the appropriate warning message or signal is transmitted under the following conditions:
3.2.2.2.1.1.
Where a permanent failure within the electric control transmission of the towed vehicle braking system precludes the service braking performance being met, simulate such a failure and check that byte 2, bits 3-4 of EBS 22 transmitted by the towed vehicle is set to 01b. A signal should also be transmitted via pin 5 of the ISO 7638 connector (yellow warning).
3.2.2.2.1.2.
Reduce the voltage on pins 1 and 2 of the ISO 7638 connector to below a value nominated by the manufacturer which precludes the service braking system performance from being fulfilled and check that byte 2, bits 3-4 of EBS 22 transmitted by the towed vehicle are set to 01b. A signal should also be transmitted via pin 5 of the ISO 7638 connector (yellow warning).
3.2.2.2.1.3.
Check compliance with the provisions of point 5.2.4 of this Annex by isolating the supply line. Reduce the pressure in the towed vehicle pressure storage system to the value nominated by the manufacturer. Check that byte 2, bits 3-4 of EBS 22 transmitted by the towed vehicle is set to 01b and that byte 1, bits 7-8 of EBS 23 is set to 00. A signal should also be transmitted via pin 5 of the ISO 7638 connector (yellow warning).
3.2.2.2.1.4.
When the electrical part of the braking equipment is first energised check that byte 2, bits 3-4 of EBS 22 transmitted by the towed vehicle is set to 01b. After the braking system has checked that no defects that require identification by the warning signal are present the above message should be set to 00b.
3.2.2.3.Response time checking
3.2.2.3.1.Check that, with no faults present, the braking system response time requirements laid down in point 4.5.2 of Annex III are met.
3.2.2.4.Automatically commanded braking
In case the towed vehicle includes a function where its operation results in an automatically commanded braking intervention, the following shall be checked:
If no automatically commanded braking intervention is generated, check that message EBS 22 byte 4 bits 5 to 6 are set to 00.
Simulate an automatically commanded braking intervention, when the resulting deceleration is ≥ 0,7 m/sec2, check that message EBS 22 byte 4 bits 5 to 6 are set to 01.
3.2.2.5.Vehicle stability function
In the case of a towed vehicle equipped with a vehicle stability function, the following checks shall be carried out:
When the vehicle stability function is inactive, check that message EBS 21 byte 2 bits 1 to 2 are set to 00.
3.2.2.6.Support of the electric control line
Where the towed vehicle braking system does not support braking via the electric control line check that message EBS 22 byte 4 bits 7 to 8 are set to 00.
Where the towed vehicle braking system supports the electric control line, check that message EBS 22 byte 4 bits 7 to 8 are set to 01.
3.2.3.Additional checks
3.2.3.1.At the discretion of the Technical Service the checking procedures laid down in points 3.2.1 and 3.2.2 may be repeated with the non-braking messages relevant to the interface in different states or switched off.
Where repeat measurements of the brake system response time are carried out, variations in the value recorded may occur due to the reaction of the vehicle pneumatics. In all cases the prescribed response time requirements shall be met.
3.2.3.2.Point 2.4.2 of Appendix 1 defines additional messages that shall under specific circumstances be supported by the towed vehicle. Additional checks may be carried out to verify the status of supported messages to ensure the requirements of point 2.3 of this Annex are fulfilled.
ANNEX XIII Requirements applying to hydraulic connections of the single-line type and to vehicles fitted with them
1. General
1.1.In addition to at least one type of connection as defined in point 2.1.4 of Annex I or points 2.1.5.1.1 to 2.1.5.1.3 of that Annex, a hydraulic connection of the single line type may be installed on the tractor.
1.2Hydraulic connections of the single-line type shall be so designed as to ensure that the braking systems covered by the provisions of Annexes I to XII are not to be adversely affected by any operation of this equipment or in the event of any failure of this equipment.
1.3.The service braking system of the tractor shall be fitted with a device so designed that if the towed vehicle braking system should fail, or the control line between the tractor and towed vehicle should break, it will still be possible to brake the tractor with the effectiveness prescribed for the secondary braking system in this Regulation.
2. Hydraulic connections of the single-line type between tractors and towed vehicles equipped with hydraulic braking systems shall fulfil the following requirements:
2.1.Type of connection: hydraulic control line with the male connector on the tractor and the female connector on the towed vehicle. The connectors shall comply with ISO 5676:1983.
2.2.With the engine running and the control device of the service braking system of the tractor fully applied a pressure between 10 000 kPa and 15 000 kPa shall be generated on the control line.
2.3.With the engine running and no brake control device on the tractor applied (driving or stand-by condition), the pressure supplied at the coupling head of the control line shall be 0+200 kPa.
2.4.The response time requirements of Annex III do not apply to this type of connection.
2.5.The compatibility requirements according to Appendix 1 to Annex II do not apply to this type of connection.
3. Alternative requirements
As an alternative to the requirements of points 1 and 2, hydraulic connection of the single line type installed on tractors shall fulfil all the requirements of the current point, in addition to the provisions of points 1.2 and 2.1.
3.1.The hydraulic circuit shall be provided with a relief valve to prevent hydraulic pressures exceeding 15 000 kPa.
3.2.With no brake control device (including parking brake) applied on the tractor, at any engine revolutions per minute (RPM) between low idle and rated speed, pressure at coupling head shall be between 1 000 and 1 500 kPa.
3.3.Applying tractor service brakes gradually, pressure at coupling head shall increase progressively and reach the maximum specified value, which shall be between 12 000 and 14 000 kPa. Requirement shall be fulfilled at any engine RPM, as described in point 3.2.
3.4.Permissible relationship between braking rate TM/FM and the coupling head pressure pm shall be lower than line AAA of Figure 1. Requirement shall be fulfilled by the unladen vehicle.
3.5.The response time at the coupling head, measured connecting the towed vehicle simulator (as described in point 3.10) to the tractor, shall not be higher than 0,6 seconds. The response time shall be measured at the coupling head, starting from the moment of the pedal actuation until the moment when pressure reaches the value of 7 500 kPa. During the test, engine RPM shall be set to 2/3 of the rated speed. The ambient and vehicle temperature shall be stabilised between 10 °C and 30 °C. The pedal actuation time necessary to reach a pressure of 10 000 kPa at the coupling head, shall be not less than 0,2 seconds.
3.6.In case of failure of the towed vehicle braking system part, located on the tractor side, a pressure drop to 0 kPa (measured at the coupling head) shall be generated within 1 second, in order to apply the brakes of the towed vehicle. The same provision applies in case of shut off or low efficiency of the energy source.
3.7.In case of failure of the tractor service brakes, operator shall be able to drop the pressure at the coupling head to 0 kPa. This requirement may be achieved by an auxiliary manual control device.
3.8.The tractor shall be equipped with the warning signal specified in point 2.2.1.29.1.1 of Annex I; it shall be activated when the pressure in the towed vehicle braking system drops below 1 000(+0 – 200) kPa.
3.9.Braking valve and energy source shall be marked in accordance with the requirements laid down on the basis of Article 17(2)(k) and (5) of Regulation (EU) No 167/2013.
3.10.Towed vehicle simulator: The device simulating the towed vehicle braking system shall include a hydraulic circuit provided with one female coupler as per ISO 5676-1983 and two identical hydraulic energy storage devices, fitted with spring elements and fulfilling the requirements reported in Figure 2. The simulator shall be manufactured according to the provisions of Figure 3.

pm
=
stabilised hydraulic pressure at the coupling head (kPa).
TM
=
sum of braking forces at the periphery of all wheels of tractors
FM
=
total normal static reaction of road surface on wheels of tractors

diagram A B C for maximum permissible mass up to 14 tons.
diagram A D E for maximum permissible mass higher than 14 tons
Note: tolerance admitted ± 2 %

1
=
hose of 2 000 mm length with one female coupler as per ISO 5676-1983;
2
=
tube of internal diameter 8 mm and length of 4 000 mm;
3
=
tube of internal diameter 8 mm and length of 1 000 mm;
4
=
tube of internal diameter 8 mm and length of 1 000 mm;
5
=
piston brake simulating elements;
6
=
spring adjusted elements acting on the total stroke of the piston;
7
=
spring adjusted elements acting only at the end of the pistons stroke.
(2)
Council Directive 76/432/EEC of 6 April 1976 on the approximation of the laws of the Member States relating to the braking devices of wheeled agricultural or forestry tractors (OJ L 122, 8.5.1976, p. 1).
(3)
Council Decision 97/836/EC of 27 November 1997 with a view to accession by the European Community to the Agreement of the United Nations Economic Commission for Europe concerning the adoption of uniform technical prescriptions for wheeled vehicles, equipment and parts which can be fitted to and/or be used on wheeled vehicles and the conditions for reciprocal recognition of approvals granted on the basis of these prescriptions (Revised 1958 Agreement) (OJ L 346, 17.12.1997, p. 78).
(4)
Points 2.3.10, 2.3.11 and 2.3.12 only apply to the parking braking system differential travel calculation method.
Options/Cymorth
Print Options
PrintThe Whole Regulation
You have chosen to open the Whole Regulation
The Whole Regulation you have selected contains over 200 provisions and might take some time to download. You may also experience some issues with your browser, such as an alert box that a script is taking a long time to run.
Would you like to continue?
You have chosen to open Schedules only
Y Rhestrau you have selected contains over 200 provisions and might take some time to download. You may also experience some issues with your browser, such as an alert box that a script is taking a long time to run.
Would you like to continue?
Mae deddfwriaeth ar gael mewn fersiynau gwahanol:
Y Diweddaraf sydd Ar Gael (diwygiedig):Y fersiwn ddiweddaraf sydd ar gael o’r ddeddfwriaeth yn cynnwys newidiadau a wnaed gan ddeddfwriaeth ddilynol ac wedi eu gweithredu gan ein tîm golygyddol. Gellir gweld y newidiadau nad ydym wedi eu gweithredu i’r testun eto yn yr ardal ‘Newidiadau i Ddeddfwriaeth’.
Gwreiddiol (Fel y’i mabwysiadwyd gan yr UE): Mae'r wreiddiol version of the legislation as it stood when it was first adopted in the EU. No changes have been applied to the text.
Dewisiadau Agor
Dewisiadau gwahanol i agor deddfwriaeth er mwyn gweld rhagor o gynnwys ar y sgrin ar yr un pryd
Rhagor o Adnoddau
Gallwch wneud defnydd o ddogfennau atodol hanfodol a gwybodaeth ar gyfer yr eitem ddeddfwriaeth o’r tab hwn. Yn ddibynnol ar yr eitem ddeddfwriaeth sydd i’w gweld, gallai hyn gynnwys:
- y PDF print gwreiddiol y fel adopted version that was used for the EU Official Journal
- rhestr o newidiadau a wnaed gan a/neu yn effeithio ar yr eitem hon o ddeddfwriaeth
- pob fformat o’r holl ddogfennau cysylltiedig
- slipiau cywiro
- dolenni i ddeddfwriaeth gysylltiedig ac adnoddau gwybodaeth eraill
Rhagor o Adnoddau
Defnyddiwch y ddewislen hon i agor dogfennau hanfodol sy’n cyd-fynd â’r ddeddfwriaeth a gwybodaeth am yr eitem hon o ddeddfwriaeth. Gan ddibynnu ar yr eitem o ddeddfwriaeth sy’n cael ei gweld gall hyn gynnwys:
- y PDF print gwreiddiol y fel adopted fersiwn a ddefnyddiwyd am y copi print
- slipiau cywiro
liciwch ‘Gweld Mwy’ neu ddewis ‘Rhagor o Adnoddau’ am wybodaeth ychwanegol gan gynnwys
- rhestr o newidiadau a wnaed gan a/neu yn effeithio ar yr eitem hon o ddeddfwriaeth
- manylion rhoi grym a newid cyffredinol
- pob fformat o’r holl ddogfennau cysylltiedig
- dolenni i ddeddfwriaeth gysylltiedig ac adnoddau gwybodaeth eraill
 Mae’r holl gynnwys ar gael dan Drwydded Llywodraeth Agored v3.0 ac eithrio ble nodir yn wahanol. Yn ychwanegol mae’r safle hwn â chynnwys sy’n deillio o EUR-Lex, a ailddefnyddiwyd dan delerau Penderfyniad y Comisiwn 2011/833/EU ar ailddefnyddio dogfennau o sefydliadau’r UE. Am ragor o wybodaeth gweler ddatganiad cyhoeddus Swyddfa Gyhoeddiadau’r UE ar ailddefnyddio.
Mae’r holl gynnwys ar gael dan Drwydded Llywodraeth Agored v3.0 ac eithrio ble nodir yn wahanol. Yn ychwanegol mae’r safle hwn â chynnwys sy’n deillio o EUR-Lex, a ailddefnyddiwyd dan delerau Penderfyniad y Comisiwn 2011/833/EU ar ailddefnyddio dogfennau o sefydliadau’r UE. Am ragor o wybodaeth gweler ddatganiad cyhoeddus Swyddfa Gyhoeddiadau’r UE ar ailddefnyddio.